Hirdetés
- Brogyi: CTEK akkumulátor töltő és másolatai
- sziku69: Fűzzük össze a szavakat :)
- Luck Dragon: Asszociációs játék. :)
- eBay-es kütyük kis pénzért
- Sub-ZeRo: Euro Truck Simulator 2 & American Truck Simulator 1 (esetleg 2 majd, ha lesz) :)
- ldave: New Game Blitz - 2025
- Lalikiraly: Astra kalandok @ Negyedik rész
- Lalikiraly: Kaáli Autó-Motor Múzeum
- gban: Ingyen kellene, de tegnapra
- 8th: A NOB legalizálja a doppingot?
-

LOGOUT
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-

tvamos
nagyúr
Ez? Mert ennek nem tul analog a kimenete. Pull-up nelkul kell digitalis bemenetre kotni.
When receiver receive the return infrared light, the receiver end will connected through, E ends will output high TTL, which close to Vcc value, if not the E ends output low TTL close to GND.
In the cases of real life, we can use MCU to scan E end to check the status
Persze, ez meg veletlen sem TTL kompatibilis, de az mindegy is, az MCU-d bemenete ugysem TTL..."Mi történik akkor, ha egy olyan lábon olvasok analóg értéket, amin van egy aktív pinChange interrupt? Ezek összeveszhetnek egymással? Vagy tiltsam le az interruptot az olvasás idejére aztán állítsam be újra?"
Nem csinaltam meg ilyet, de szerintem ez nem tul jo otlet. Bar, akar mukodhet is, nem neztem az adatlapot, hogy pontosan hogyan zajlik az AD konverzio. -
tvamos
nagyúr
Szerintem nem mukodne igy stabilan. Nem szokott ennyire pontos ertek lenni az a felhuzo ellenallas, meg a bemenet sem teljesen pontos, es van neki egy kis homerseklet fuggo leakage-e, meg driftje. Raadasul, ha nem schmitt trigger, akkor a komparalasi szint kozeleben nem kell, hogy stabilan mukodjon, akar kapcsolgathat is ide-oda egy kicsit.
En tennek oda valami kulso hiszterezises komparatort, vagy schmitt triggert, vagy kotnem analog bemenetre. -

lac1
csendes tag
Semmi nem akadályoz benne, csak amikor kibontottam és rácsodálkoztam az eltérésre, azt hittem, annyival megúszom - és ez is áll közelebb a szívemhez - hogy levágom a nem kellő végét a csatlakozónak, négyet bedugok az Arduino paneljára és kész is.

Most van egy viszonyítási alapom, a GND-t megmérem, ha az jó, akkor elvileg a többi is.
A méréstől félek kicsit, mert nem tudom, hogy a multiméter mérőfeszültsége esetleg nem okoz-e kárt, a GND-ben biztosan nem, de ha máshogyan van a kiosztás, akkor az adatcsatlakozón akár lehetséges a félelmem szerint.
Még futok vele egy-két kört, aztán marad a forrasztás ha nem találok valami emberi megoldást. -
lac1
csendes tag
Közben találtam hasonló, de csak hasonló másmilyent, de ott más a chip.
De a színes megoldás az jó ötlet, remélem a chip típusától eltekintve a kiosztás az lehet. Egyébként az előbbi linkelt másik kép, ahol az a rajzolt lábbekötés volt, azon 7 csatlakozási pont van, szóval azt nem is értem, hogy az illető mire gondolt.
..
Ja, a kapcsoláson jobbról a harmadik a GND, de amit találtam hasonlót, ott meg valamelyik szélső a GND. Szóval nem tudom. -
lac1
csendes tag
Rá van szitázva az elektronikára hátul. Ide tudnám ráforrasztani, csak ez mint utolsó utáni megoldásként jelenik meg nálam.
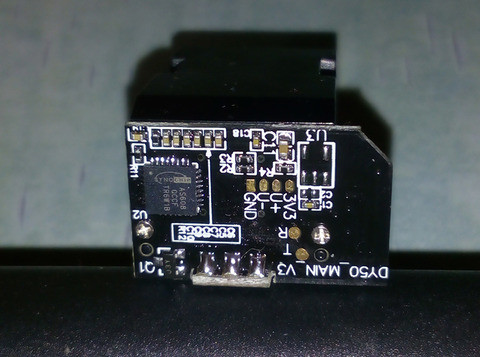
Igen, igen, nincs felirat a csatlakozón, vagyis hogy "J3", de ez csak az a csati azonosítója lehet, de, hogy hol a "J2" és "J1" azt nem látom. Ez egy olyan verzió lehet (rá is van írva, hogy xxxxxx_v3), hogy konkrétan ilyent nem is találtam még úgy sem, hogy csak kép van róla. A chipre írt típust is egy helyen találtam meg, azt is fórumon (külföldi) és ott a srác azt kérdezte a nagyérdeműtöl, hogy a hatból bekötött négyet és mirw való a maradék kettő. Tehát chipre, nyára szitázott felirat alapján én legalábbis nem találtam semmit, és ugye az Arduino-s projektnél az ujjlenyomat olvasó közvetlenül csatlakozik magára az Uno-ra, de én meg a képen látszódó módon olyan kábelt kaptam hozzá, hogy mind a két végén gyorscsatlakozó van.
Most vagy van átalakító - tudom, le lehet vágni a csatlakozót és a vezetékek végét rákendácsolni az Arduino-ra, de szerintem a fejlesztők nem így gondolták - vagy nem tudom. -
lac1
csendes tag
Bocsi, nekifutok még egyszer a problémám leírásának.
Ezt rendeltem:És ez jött az alábbi képen. Látszik, hogy ami jött, van 6 piros kábel, leírás nuku. A link alattin meg a kivitel is más, pláne a kábelek. Dispute-t annyira nem szeretnék, mert azt gyorsabbnak gondolom, hogy találok leírást - esetleg az itteni segítséggel - erről a cuccosról és akkor tulajdonképpen nincs probléma.
Én nem ragaszkodom ilyenkor soha a megrendelthez, mert nekem a funkció és a működés a fontos.
-

Janos250
őstag
Kösz!

Ez érdekes, ajánlom mindenki figyelmébe!A szenzorok néha eléggé érzékenyek

Én jelenleg egy MAX6675 hőmérséklet mérővel szívok, mert ha hozzáérek, 10-50 fokot is ugrik. Pedig lassan már a fülemen is kondi és ellenállás lesz, de úgy látszik, túl jó antenna vagyok. 400 fok körül kell mérni, ezért vagy ez, vagy a Pt100, de ez utóbbi elég drága, bár sokkal pontosabb. Lehet, mégis át kell állni Pt100-as ellenállás hőmérőre. -
-
#5214
 leventekov
csendes újonc
Aryes
#5213
leventekov
csendes újonc
Aryes
#5213
leventekov
csendes újonc
1. Ha idozites miatt bekapcsolva van ki lehessen kapcsolni gombrol es vissza. Ha lekapcsolva van az idozites miatt fel lehessen kapcsolni es le, de az idozites programozasa maradjon meg.
ez azert kel mert ha veletlenul fel szeretnem kapcsolni mikor az idozito miatt ki van kapcsolva , vagy forditva.
-
#5131
 MobilosFeca
tag
Aryes
#5125
MobilosFeca
tag
Aryes
#5125
MobilosFeca
tag
Sajnos nem igazán, one touch power window modul-ra rákeresve ebayen sem találsz sokmindent, ami van az is drága és nem is megfelelő. Mindenkinek nagyon köszönöm, aki eddig segített, és látszik hogy bizony egy Arduinoval (anyagárban) olcsón megoldható lenne a dolog. Ráírok Attilára ha jól értem, akkor nekem az ő elektronikája tökéletes lenne, ha nem, akkor még mindíg keresek valakit, aki hajlandó nekem ezt összehozni.
-
Janos250
őstag
Pedig azt várom, hogy leírjátok a tapasztalatokat, mert ha lesz időm, én is ki akarom próbálni. A mag szenzor nekem is alig változik, úgy tűnik, ez normális.
Értelmezés:
A panelon fel vannak rajzolva a tengelyek. Ha pl élére állítod, akkor a nehézségi erő egyik tengely irányában 0 másik tengely irányában maximális. Próbálgasd, és rájössz, mi micsoda. A számértékek önmagukban semmit nem érnek, valóban kalibráció kellene. A szögsebesség meg minden tengely irányába 0 (kicsi), ha áll, amíg forgatod, addig meg valamennyi. Itt se ér semmit az érték maga kalibráció nélkül. Az iránytűvel nem boldogultam. Való igaz, hogy mozgás esetén csak a gyorsulás és a szögsebesség együttese adhat jó eredményt, valahogy kiszámolva belőlük a jó értéket. Ha megtalálod a leírását, milyen képletekkel számolni, oszd meg lsz. Belegondoltam, de nem tűnik olyan egyszerűnek a képleteket levezetni. -
Janos250
őstag
Na, az enyém ránézésre tök ugyanez, de MPU92/65 van ráírva. Van benne 3 x 3 tengelyes gyorsulás, szögsebesség és mágnesség szenzor. Légnyomásmérő nincs, az úton van, amiben légnyomásmérő is van.
Igen, elég a felső 4 tűt bekötnöd. Én 3.3 -al hajtom, fene tudja, mit bír. Azt az ötlábú sánta pókot nem tudtam kideríteni, hogy az egy fesz. szab., vagy mi a csuda. Bár nem is nagyon foglakoztatott az ügy.Az általam linkelt program valóban csak ennek a 3 szenzornak az értékeit írja ki. Egy utasítással beolvassa a gyorsulás (azaz térbeli helyzet) + szögsebesség értékeket, egy másikkal a megnetometert. Abba tényleg nem gondoltam bele, hogy ezeknek nem külön-külön, hanem komplexen van értelme ha mozog a panel, mert pl. a gyorsulásmérő által érzékelt adat természetesen függ a szögsebességtől is, stb. Én szeretem pontosan tudni, hogy egy IC-nek konkrétan milyen adatot küldök ki, és mit válaszol rá. Ebben a primitív mintapéldában ez teljesült, láttam, mit kell írni az I2C buszra, és milyen választ kapunk. Majd én is megnézem azt a komplexebb programot is, mert tényleges használathoz valóban az kell.
Tudja valaki, hogy mi a különbség a 9250, 9265 között?
-

fpeter84
senior tag
Azért mert a linkelt stackoverflow-s szösszenet tesztelésen kívül nem sokra jó - csak a magnetometert olvassa ki, cirka annyi mintha nem is a 9DOF MPU9250-et vetted volna csak egy alap HMC5883L-t. Önmagában nem sokra mész ezekkel a mért adatokkal mert nincsen viszonyítási pontod a térben (ehhez kell az acc) valamint nincsen korrekció az elmozdulásra és elforgásra (acc+gyro).
Ha tökéletesen vízszintesen tartanád a modult és nem mozdítod/forgatod akkor elég lenne, de ahogy elmozdul ahhoz már mind a 9 adat kell hogy értelmes irányadatot kapj bonyolult matekozással - de ezt elvégezi a library
-
fpeter84
senior tag
tölsd le az RTIMULib csomagot, a libraries könyvtár tartalmát másold át az arduino-ban beállított lib könyvtárba, a többi pedig a példaprogramok. A lib-ben a RTIMULibDefs.h -t szerkeszd át, a 32-es sorral alapból a 9150 van kiválasztva - ezt kommenteld ki és aktiváld helyette valamelyik 9250-et - a címet most így nem tudom hogy a kettő közül melyik lehet, de látni fogod ha egyikkel olvassa, a másikkal pedig nem...
Először a magcal programon kell végigmenni és s-el lementeni a kalibrálási értékeket, utána lehet használni az arduimu-t
-
Janos250
őstag
Ez a mintaprogram majdnem működik:
http://stackoverflow.com/questions/36242308/arduino-sensor-10dof-mpu9255-cannot-fetch-magnetometer-data
Ha az egyik hozzászólásban szereplő kiegészítést, azaz, hogy utolsó sornak tedd be az:
I2CwriteByte(MAG_ADDRESS,0x0A,0x01);
sort, akkor a majdnem törölhető. Akkor már rendesen működik.
Persze, ha ugyanarra az IC-re gondolunk. Ne zavarjon meg, hogy
#define MPU9250_ADDRESS 0x68
van benne, attól még ugyezzel megy, ugyanúgy 0x68-on, azaz 0xD0, 0xD1-en.
Vannak a neten elbonyolított verziók is, amik biztosan többet tudnak, de én ezt találtam célnak leginkább megfelelőnek.
Ha a wire default SCL, SDA lábait használod a panelon (mellesleg rá van írva a panelra), más nem kell hozzá.
Az más kérdés, hogy én az "iránytű" részét nem igazán tudtam használni.
A giro szenzornál is, ha nem szögsebességet akarunk, hanem abszolút elfordulást, akkor integrálni kell, de nekem ez elég pontatlan.
Én a
#define GYRO_FULL_SCALE_250_DPS 0x00
és a
#define ACC_FULL_SCALE_2_G 0x00
állítottam be, hogy érzékenyebb legyen.Ja, azt nem tudom, melyik a "linkelt lib". A wire az össze arduino panelhoz "benne van a rendszerben"
-
#5080
 DrojDtroll
veterán
Aryes
#5079
DrojDtroll
veterán
Aryes
#5079
DrojDtroll
veterán
-

icemad
nagyúr
Lámpára egyik megoldás: [link]
Ebben bemutatják, hogy a scanner lámpákat hogy lehet vezérelni arduinoval. Mivel ezekben nagyrészt rgb ledek vannak, egész klassz dolgokat lehet fabrikálni.
Az elektronikát passzolom, sajnos ez gépenként nagyon eltérő. Ami még hasznos lehet ilyen gépekből azok a csatlakozók és a gombok, kapcsolók. Pl. A billenőkapcsoló, ami azt figyeli, hogy van e a nyomtatóban papír. Ezzel és a lámpával, már megoldható, hogy ha pl. kihúzod a billentyűzet tartót, akkor kapcsoljon a lámpa. Stb. -
fpeter84
senior tag
Nem szerencsés, a legtöbb félvezető max tápfesz+0.3V-ot tolerál hivatalosan a bemeneti lábain - kivéve ha kifejezetten le van írva hogy "5V tolerant" a 3.3V-os mikroproci egyes lábain... Tegyél rá ellenállás feszosztót amit ~3V környékére be tudsz lőni, akkor garantáltan nem okoz károsodást...
-
icemad
nagyúr
Pl. A szkenner részből kiszeded a lámpát. Számítógép asztalnál a billentyűzet vilagitashoz tökéletes. (amelyik kihúzható billentyűzettartós) Esetleg az üveg lap vagy plexi is jó lehet valamire. (én multi-touch vezérlőt csináltam belőle.) Ha van rajta színes kijelző, én azt is menteném. A motorokhoz a fogaskerekeket se hagyd ki. Eléggé sok alkatrésze felhasználható.
-
Janos250
őstag
Én csak a földet közösítettem, a stabil 3.3V-ot külső tápról adom.
5V-al egyik egyszer elkezdett füstölni, mert az egy régebbi példány volt, azon még volt egy led, az füstölt el. Azóta már lehagyták a ledet, csak a helye áll üresen.
Az enyém kissé más, mert egy segéd proci is dolgozik benne. Elvileg. Info hozzá gyakorlatilag semmi, csak egy Rc522Manager.exe PC program, abból lehet silabizálni logikai analizátorral a dolgokat, de elég macerás.Tápot meg ilyeneket használok:
http://www.ebay.com/itm/142115713794?_trksid=p2057872.m2749.l2649&var=441196564265&ssPageName=STRK%3AMEBIDX%3AIT
http://www.ebay.com/itm/131751880871?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
http://www.ebay.com/itm/best-Mini-3A-DC-DC-Converter-Adjustable-Step-down-Power-Module-replace-LM2596s-/131993566678?hash=item1ebb6dfdd6:g:b4wAAOSwKOJYHSBt
http://www.ebay.com/itm/NEW-Professional-1-23-30V-LM2596-DC-DC-Adjustable-Power-Step-down-Module-/322317977619?hash=item4b0ba60813:g YkAAOSw5cNYHZx4
YkAAOSw5cNYHZx4Meg jóval erősebbet is, de azt hirtelenjében nem találom.
-
Janos250
őstag
Én másik fajtát próbáltam. Abban eleve van egy STM8, ami elvileg kezeli, de idegbaj .
Két kártyám van, azokat kb 1 cm távról tudja olvasni, ha ERŐS tápot adok neki. USB tápjával semmi.
A marék kulcstartóból az életben egyszer egyet sikerült olvasni, de lehet, hogy az is a mellette lévő kártya volt.
Soha többé se olvasni, se írni nem tudom őket. Arduinoval még nem is próbáltam, az Icstation oldaláról letöltött PC-s test programmal próbálgattam.
Telefonnal hogyan tudod ezeket a kártyákat olvasni? -
Readerhez ez van írva:
" The card reader and the tags communicate using a 13.56MHz electromagnetic field.
The RFID MFRC522 module supports MF1xxS20, MF1xxS70 and MF1xxS50 tags"A kártyához meg:
" Chip: FUDAN fully compatible with MF1S50
Operating Frequency:13.56MHz "Szóval eszerint kompatibilisek, mégse működnek együtt.

-
-
-
#4941
 razorbenke92
őstag
Aryes
#4939
razorbenke92
őstag
Aryes
#4939
A morcogás az gyakori. Mechanikai nemlinearitások miatt nem képes oda beállni, ahova szeretne, de a szabályzójában nincs integrátor, így azzal a pici erősítéssel próbálja megoldani.
Ha pici a táp árama, akkor növeld, ha elég nagy áramot tud a táp, akkor próbálj neki nagyobb feszültséget adni. 5,5V simán jó, de az RC-s alkalmazásokban a jobb beállási idők miatt a 6V-ot is rájukteszik.
-
#4838
razorbenke92
őstag
Aryes
#4837
Én az analóg eszközöket úgy szoktam használni, hogy a kezembe veszem a hardvert, elkezdem mozgatni olyan pici lépésekkel, amekkorákat tudok okozni.
Ez megszámolom, tegyünk feltudok végállástól alapállásig 10 pozíciót csinálni.
Ha ezt tudom, megnézem soros monitoron, hogy mettől meddig csinál értékeket az eszköz. Pl. 7-1013
Végeredmény map függvénnyel:
map(analogRead(A0),7,1013,-10,10);
Ez így bőven elég szokott lenni, hogy feldolgozzam a mozdulataim qvantumát, és kiküszöböli a nulla körüli jittert is.
Ha gondolod élj vele, és akkor nem kell szűrőkkel bajlódnon.
-

Gergosz2
veterán
Eddig csak az volt a válasz, hogy "mert csak", ennyit meg a feleségemtől is megkapok bármikor...
Nem nem az volt. Ha kicsit belegondolsz teljesen logikus, hogy sokkal nagyobb frekis PWM jel kell. Általános szabály, hogy a rendszer legkisebb időállandójánál gyorsabban akarjunk beavatkozni. Ezeknél a DC motoroknál ez az időállandó rendszerint a milliszekundumos nagyságrendben van, így teljesen indokolt, hogy kHz es nagyságrendben kapcsolgassunk.
(#4663) tvamos
Nincs jo, es rossz indukcio, csak egy van
Ahogy mondod. Én sem igazán értem ezt a szükséges rossz meg hasonló megközelítsét. Ezt tudja a fizika és pont. Erről az jut eszembe, hogy pl. a szórt induktivitásokra kb. mindenki rossz szemmel gondol. Nem, nem az, kell az áramkorlátozásra. -

robohw
aktív tag
Azért, mert léteznek holtpontok a motor forgása közben (ahogy ezt is írták előttem) és ha a PWM ezen holtpontokon éppen kikapcsol, akkor a motor teljesítményének annyi. Így a frekvenciát hozzá kell hangolni a motor karakterisztikájához. Ezt neked nem kell megtenned, pláne nem patikamérlegen mérve, de ha egyszer 10-50 kHz-et ajánlanak olyanok, akik nálad jobban képben vannak ilyesmivel (lásd az írás szerzőjét például), akkor azt illik megfontolni, legalábbis ha eredményt akarsz.
-
robohw
aktív tag
"Folyamatosan 6.6V-ot kapnak, négyszögjel formájában. Miért kapná meg a motor ennek a tört részét?"
Átlagban kapja a tört részét. De ez éppen elég ahhoz, hogy a motor teljesítményén is meglátszódjon.
Ha én 10 voltot kapcsolgatok, akkor a bekapcsolt állapotban 10 volt jut a motorra, de ha a kitöltési tényezőm csak 25 %, akkor ez azt jelenti, hogy egy perc időtartam alatt a motorom csak 15 másodpercen keresztül ad le 100 %-os teljesítményt. A motor tehetetlensége folytán ez a kimeneten úgy jelentkezik, hogy durván 25 %-ot fog teljesíteni a motor a 100 % helyett.A PWM-es hajtás másik jellemzője, hogy általában nincs 100 % kitöltöttség, tehát a lehetséges maximumnak (feszültség) csak valahányad részét kapja meg a motor.
-
robohw
aktív tag
" akkor mégis mire fel az egész próbálkozás, hogy magasabb frekvencián üzemeltessem?"
Nincs próbálkozás. Javaslat van, a helyes használatra. Próbálkozás nálad van, amikor a dolgok átértése nélkül erőlteted azt, ami szerinted helyes. Csak hát, ezzel egyedül vagy.
Olvasd el ezt:
"Az impulzusszélesség-moduláció (angolul pulse-width modulation, PWM) vagy más néven impulzusidőtartam-moduláció (pulse-duration modulation, PDM) az inerciális elektromos eszközök szabályozására elterjedten alkalmazott technika, melyet a korszerű teljesítményelektronika tett a gyakorlatban is használhatóvá.
A fogyasztóba táplált átlagos elektromos feszültséget és áramerősséget a táp és a fogyasztó között lévő kapcsoló gyors ütemű be- és kikapcsolásával szabályozzák. Minél hosszabb ideig van a kapcsoló a bekapcsolt állapotában a kikapcsolt állapot időtartamához képest, annál nagyobb lesz a fogyasztóba táplált teljesítmény.
A PWM kapcsolási frekvenciájának sokkal magasabbnak kell lennie, mint ami hatással lenne a fogyasztóra. A kapcsolási frekvenciának jellemzően 120 Hz-nek kell lennie egy lámpa fényerőszabályozójában, néhány kHz-től néhány száz kHz-ig terjedőnek egy motorvezérlőben, és jó néhány száz kHz-nek egy hangerősítő és egy számítógépes tápegység esetében."
-
-
robohw
aktív tag
"Ezek szerint két napja megy itt az akadémikus szintű vita meg fogalommagyarázás egy olyan állításom körül, ami valójában igaz"
Nem. Egy olyan állításod körül megy a vita, ami nem igaz és soha nem is volt az.
Emellett, azért én veszem a bátorságot, hogy felvilágosítsalak, ahhoz képest elég nagy a szád és eléggé követelőző vagy, amennyire fogalmad sincs a témáról és amennyi sületlenséget összehordasz. Tudod, te itt egyáltalán nem várhatod el, hogy bárki az idejét áldozza arra, hogy segítsen neked. Nem szabhatod meg, hogy ki milyen hozzászólást fogalmaz meg adott kérdésben, azt pedig, hogy kijavítja valaki a tévedéseidet, inkább köszönd, mint kritizáld. -
robohw
aktív tag
1. Ide más is jár, szintén segítségért, észleletem szerint jobbára amatőrök és nem tudom miért volna jó, ha a hibás fogalmakat ismernék, tanulnák meg az itt előfordulók. Én legalábbis ezért korrigálok, ha teszem.
2. Azt más is és én is megjegyeztem, hogy a 30 Hz talán nem a legmegfelelőbb. Én speciel kétszer is. Most, utóbb meg is indokoltam, hogy miért. Olvass vissza. De ha neked a 30 Hz megfelelő, akkor semmi gond, használd úgy.
Azt hozzá kell tennem, hogy az általad alkalmazott motorok hajtóművesek, tehát a kivánt fordulatszámhoz ezt is hozzá kell számolni a PWM frekvenciájának számításánál.Az a fúrógép 800 Wattos, ami félgőzzel meghajtva is elégséges a munkavégzéshez, hiszen vannak 250 watt teljesítményű fúrógépek is. A kis modellmotorok pedig kínaiak, ami annyit tesz, hogy a feltétlenül szükséges anyagmennyiségnél egy tizedgrammal sincs több bennük. Ez nyilván kihat a teljesítményükre is. Az sem mellékes, hogy, mint azt említettem, a 2.5 - 12 Voltos motor a teljesítményének maximumát nyilván nem fogja leadni 5 volton még akkor sem, ha direktben van járatva, hát még PWM-en keresztül, ami mindjárt azt jelenti, hogy az 5 voltnak is csak tört részét kapja meg.
3. A segítségnyújtás olykor kioktatás. Csendben jegyzem meg, beírásaid némelyike azt sugallja, erre egyben-másban rá is szorulnál. Természetesen jó értelemben, segítő szándékkal mondom ezt. Sajnálom, hogy te másképp érezted vagy értelmezted.
-
robohw
aktív tag
"Mondhatjuk azt, hogy az indukció, amiről itt két napja vitatkozunk, úgy alakul ki, hogy a tekercsben futó áram által gerjesztett mágneses tér változása hat vissza a tekercsre, és indukál benne ellenkező irányú áramot?"
Igen, mondhatjuk, de a motor nem ettől az indukált áramtól (feszültségtől) fog forogni és azt hiszem ez volt a lényeg,
Az így indukálódott áram (feszültség) a szükséges rossz, hiszen éppen a szükséges (hasznos) erő ellen hat.
Mintha egy csövön keresztül vizet akarnál vezetni, de cső ellenkező végéből is elindulna a víz áramlása. Ez nyilván nem jó.A te esetedben az a jelentősége ennek, hogy a PWM, mint írtam is korábban, a feszültség be és kikapcsolás, gyors egymásutánban, a kitöltési tényezőnek megfelelő ritmusban, vagy időpillanatokban.
Nos, a kikapcsolás és a bekapcsolás pillanatában is, az indukálódó feszültség iránya az elkívánt ellen hat, tehát ha a PWM frekvenciája 'olyan', akkor az jelentősen ronthat a motor hatásfokán. Ezért kell a frekvenciát jól megválasztani, ami az esetedben módfelett alacsony. -
robohw
aktív tag
Arról polémiát nyitni, hogy az igazság kiderüljön egy-egy téma kapcsán, soha nem értelmetlen. Legalábbis szerintem.
És hát, igen, az autók esetében is igaz, hogy a súrlódás egy szükséges rossz, mivel a súrlódás növeli a befektetendő energiát, csökkenti a hatásfokot, ezért is kenik a csapágyakat, ugyanakkor nehéz lenne megállni egy autóval, ha súrlódás nem létezne.
-

gyapo11
őstag
Tudtommal a motorok indukcióból csinálnak mozgási energiát...
Ahogy robohw már megírta, mágneses erőtérből. Az állórészben állandó mágnesek, a forgórész meg tekercs(ek), és a kommutátor váltogatja rajta a polaritást, ezért az egyik mágnes mindig vonzza a közeledő tekercsvéget, a másik meg taszítja a távolodót, ettől forog a motor.
Az induktivitás a fizika miatt van, mert ezek a törvények működnek az univerzumban, de jó lenne, ha a motorban nem lenne csak mágneses tér, akkor is forogna. -
robohw
aktív tag
-
-
robohw
aktív tag
"Viszont nincs: jack dugóm, sztereó potméterem, utóbbit a sarki hobbielektronika boltban elég drágán adják."
Nem kizárólag neked írom, inkább általános tájékoztatásképpen, a topikban előfordulóknak, akik hasonló problémával küzdenek, vagy azoknak, akiknek olykor jól jönne egy szkóp.
A PC hangkártyáját szkópként lehet használni egy erre alkalmas, a neten is hozzáférhető ingyenes programmal.
Mindössze egy jack dugó kell hozzá, így, egyéb alkatrész nélkül 0 és +5 V közötti feszültségszint mérhető.
+5 Voltnál magasabb feszültségekhez nagy pontosságú, ún. műszerellenállásokból kell feszültségosztó előtétet készíteni. -
fpeter84
senior tag
Nézem az L9110 doksiját, és igazából nem kell se felhúzó, se jelszintillesztés... A test conditions rovatban 9V tápfeszhez azt írja, hogy a bemenő HI jelszint min 2.5V, tehát bőven elégnek kell lennie annak amit a uC tud adni neki - biztos ami biztos alapon egy soros ~1K-t azért odatennék, de más nem kell, az onboard felhúzókat el kell távolítani, nem is értem hogy mi a fenének tették oda őket...
-
robohw
aktív tag
"Tudtommal a motorok indukcióból csinálnak mozgási energiát.."
Nem egészen. A villamos motorok esetében a mágneses tér az ami mozgási energiát csinál.
Az indukció egy szükséges rossz a motorok esetében, ami a mágneses tér változásának következménye.Amiről te beszélsz, az a generátorok esete, de ott is fordítva van, a mozgási energiából lesz indukált feszültség.
-
robohw
aktív tag
"Akkor mégis miért nem működik nálam a pwm magasabb frekvencián?"
Így első körben arra tippelnék, hogy azért, mert valamit nagyon nem úgy csinálsz, ahogy kéne. Pl. dióda van a motor két táppontja között?
A PWM jelek, DC motorok fordulatának szabályozásához, kb. 10-50 Khz-es tartományban optimálisak.
A PWM ugyanakkor nem hullámforma, hanem négyszög. Gyakorlatilag egy kapcsolójel, amelynek a szélessége változtatható, így ha az nulla, akkor a vezérelt fogyasztó kikapcsolt állapotban, ha pedig 100 % akkor folyamatosan bekapcsolt állapotban van. 50 % esetén matematikailag fele akkora fordulatszámon forog egy PWM vezérelt DC motor. A feszültség, amit a jel rákapcsol a fogyasztóra, mindig állandó, rendre a fogyasztó által elvárt névleges feszültség. Ezt szaggatja meg a PWM jel, így lehet elérni a forgatónyomaték viszonylagos állandóságát, kisebb fordulaton.
-
gyapo11
őstag
Motorban nincs nagyon tapasztalatom, de nézzük a transzformátorokat. Egy csengőtrafó rengeteg menetet tartalmaz és kis teljesítményű. Egy combos trafó meg sokkal kevesebb menetszámú. Az is igaz, hogy a kis trafónak kisebb a vas keresztmetszete, de mivel a keresztmetszettel lineárisan, a menetszámmal meg négyzetesen nő az induktivitás, nem lepődnék meg, ha a nagyobb teljesítményű trafónak kisebb lenne.
-
tvamos
nagyúr
-
fpeter84
senior tag
A PWM frekvenciájával még nem kezdtem el játszani, de a motorok erőtlensége, nyomatéktalansága nekem is feltűnt mint említettem... Mire elkezd forogni, már alig változik valamit a fordulatszáma maximumig. Nem igazán volt időm többet játszani vele, de előbb utóbb talán sikerül...
illesztésre nem kell IC, bőven elég csatornánként 1-1 tranzisztor, vagy vannak I2C-hez szánt level converter modulok kompletten, az is jó lehet...
-
gyapo11
őstag
Szerintem az induktivitásnál nem a W számít, hanem a menetszám meg a vas permeabilitása.
Logikai alapon, ha más motorok mennek nagyobb frekvenciás pwmmel is, akkor ennél a nem menő motornál mi más oka lehet? A pwm az buta, kapcsolgatja az 5 V-ot vagy akármennyit 0 és max között váltogatva. A frekvencia növelésével egyre gyengébb, mi okozhatja ezt, ha nem az induktivitás? -
Janos250
őstag
Neked címzem, de minden amatőr figyelmébe messzemenően ajánlom a következő logikai analizátort:
http://www.ebay.com/itm/141694353386?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT
1800 Ft a szerkentyű, a program ingyen letölthető hozzá, és mellesleg ezzel az eszközzel - ellentétben számos másikkal - még működik is :-)
"Utángyártott" persze, tehát nem nagyon dicsekszünk vele, de szegény ember vízzel főz. "Próbáld ki, ha tetszik, vedd meg az eredetit"
Ez a képernyő mentés is azzal készült, éppen PWM jel vizsgálatára:
https://prohardver.hu/tema/arduino/hsz_3914-3914.html -
tvamos
nagyúr
Azért pár ellenállás bekötéséhez, meg a feszültség osztó képlet használatához nem kell sok tapasztalat. Vagy nincs hangkártyád?
Szerintem szkóp nélkül nem lehet eredményesen dolgozni ilyen projekteken.
Most nem találom a projektet, de mintha láttam volna olyan pc szkóp progit, ami a soros porton kapkodja el a jelet, talán pont egy arduino volt az adc hozzá... -
gyapo11
őstag
Nem játszottam még pwmmel, viszont a motorok jellemzően induktív eszközök, és egy induktivitáson annál kevesebb áram tud átfolyni, minél nagyobb a frekvencia. Ha nem motor, hanem led vagy izzó vagy ellenállás a terhelés, akkor semmi gond nincs, pontosan olyan lesz a részteljesítmény, amilyen aránnyal a pwm éppen működik. 100 Hz-es pwm 1/100-ad kitöltéssel 10 kHz-nek megfelelő szélességű impulzusokat dobál a motorra, aminek ekkora frekin elég nagy az induktív ellenállása. Hogyan fejtsen így ki erőt? Hatalmas cos fi lesz, az áram és a feszültség nem egyszerre van jelen, így a P=U*I kicsi lesz. Vagy szűrni kell, és ezzel a változó impulzusszélesség átalakul változó feszültséggé, amivel a motor már jól működik, vagy olyan kis induktivitású motor kell, aminél ki tud alakulni a megfelelő teljesítmény.
Négyszögjelet mérni multiméterrel nem érdemes, mert rossz értékeket mutat. Egyenirányítva és szűrve meg lehet mérni a csúcsot, de ez semmit nem mond pl. a kitöltési tényezőről.
A hangkártyás szkóphoz csak egy ellenállásosztó kell, hogy ne menjen a hangkártyába pár tized V-nál több feszültség.
-
robohw
aktív tag
Amit tvamos ajánl, az lesz a jó neked.
A hangkártyáddal és egy hozzá való szkóp programmal (találsz ilyet a neten) szépen meg tudod nézni, mi a helyzet.
A PWM-et nem lehet multiméterrel mérni.A PWM lényege, hogy a feszültségszint állandó, csak ki-be van kapcsolva, a kitöltési tényező függvényében.
50 % kitöltési tényező az annyit jelent, hogy 1 mp. alatt 1/2 mp.-ig van feszültség alatt a fogyasztó. A 25 % meg azt, hogy csak 1/4-ed mp.-ig. A kapcsolt feszültség mindig azonos. Ez kell is, hogy így legyen, mert máskülönben (ha a fesz. változna (kisebb lenne)) nem volna a motornak nyomatéka. -
tvamos
nagyúr
Valtakozo feszultseg. (A valtoaram a vasutnal a valtot mukodteti.)
A multimeter integral, nem jo neked erre. Oszcilloszkop kell. Van egy csomo leiras, hogy kell csinalni PC hangkartya oszcilloszkopot, az pont eleg lenne neked ide. Szerintem... A dc reszet meg megmered multimeterrel. -
-
-
fpeter84
senior tag
Nekem eredetileg a 4 csatornás modulon HG7881 volt, mentek is vele az ugyanilyen motorok mint a Tiéd de valahogyan mégiscsak sikerült leégniük... Elméletben pedig a csippek vezérlő lábait akár egyszerre is lehet fel/lehúzni, ignorálja és nem csinál rövidzárat - elvileg, nálam mégis megtörtént. Utána rendeltem egy marék L9110-et, lecserélgettem őket, ezekkel ismét megy de már volt rá példa ismételten hogy azt vettem észre hogy a motor nem forog és jön az amperszag a csippek felől. Szerencsére nem égett le ismét, utána ment vele a motor megint de lehet károsodott is közben... Szóval nem tudom hogy mi okozhatja ezt az összeakadást, de vannak furcsa dolgai ennek a HG7881/L9110 párosnak

És nekem sem sikerült lassan mozgatnom vele a kerekeket - egy bizonyos kitöltést megkövetel, utána meg már nem sokat változik a fordulata a maximumig... Opto kapu még nincsen hozzá, de tervben van az is...
-
tvamos
nagyúr
Nem tudom. Ezt a kontrollert együtt adták a motorral? Mert nekem is van ilyen motorom, de ha jól emlékszem, nekem megy gond nélkül, 4kHz-en. Én vagy DRV8801, vagy valami nagyobb áramú kontrollert használtam hozzá. Bár gondolom vannak különböző változatai ennek a sárga motornak is.
-
fpeter84
senior tag
"de(!) a giro-nak is van slip-je, amit meg gyorsulasmerovel szoktak kompenzalni, ami eleg bonyolult, szoval, hobbistaknak a legegyszerubb a compass."
A compass önmagában szintén nem elég... Amíg tökéletesen függőlegesen fix pozícióban forgatod a Z tengelye körül addig elméletben oké lenne, de a legkisebb elmozdulás is felborítja a működését, ezért a jó e-compass-nak szüksége van egy gyorsulásérzékelőre és egy giroszkópra is! Szerencsére egyetlen csippben meg lehet kapni, nekem eddig az MPU-9250 vált be a legjobban RTIMULib-Arduino lib-el...
(azóta hogy próbáltam már van RTIMULib2 is, ezzel nincsen tapsztalatom)Előbbre próbáltam mindenféle kombókat, lib-eket és kész modulokat de minddel szívtam - alapból bekalibrálva mintha jó lenne, de kis döntögetés és már meg is bolondul az egész vagy elkezd magától lassan körbeforogni. Az MPU-9250 a fenti libbel viszont stabilan teszi a dolgát...
Jó is hogy feljött ez a téma, nekem is van egy ilyen 4WD szettem. Van hozzá joystick shield is színes LCD-vel, master-slave kékfog modul páros, L9110-es 4 csatornás motor driver, stb. Már csak kis idő és ihlet kellene hozzá

-
tvamos
nagyúr
No, ez tok jo! Gratulalok!
Az autos projektet meg ne add fel, inkabb irj rola, mi a projekt, hatha van alternativ megoldas.
Nekem akkor volt a legjobb az egyenes tartas a vonalkoveto robotomnal, ha a caster ball hatul volt, es annak a tetejere tettem az akkupakkot. Amugy az en esetemben meg az is rontotta az oszkepet, hogy ket caster ballt hasznaltam, es azok is folyton megszorultak a kosztol, amit osszeszedett, ugyhogy en meg caster wheelre akartam pont atterni. (Csak abbol kell valami franko.)
Ez mondjuk sokkal gyorsabb, mint egy robotporszivo.
-
tvamos
nagyúr
Keresd ugy, hogy Tamiya Track and Wheel set.
De ne hidd, hogy ez a megoldas. A lanctalpas szeret egyenesen menni, csak nem szeret kanyarodni. Nem szeret gyorsan menni sem. Szeret elkuszni.
Szerintem azt a jo, ha kompenzalod a slip-et valamilyen megoldassal. Pl. giroszkop jo lehetne, de(!) a giro-nak is van slip-je, amit meg gyorsulasmerovel szoktak kompenzalni, ami eleg bonyolult, szoval, hobbistaknak a legegyszerubb a compass.
Nehez ez, mert rafut a kerek egy kis porra, es olyan szinten valtoznak meg a parameterek, hogy nincs az a pid, ami kikompenzalja a kerekek kozotti tapadas kulonbseget. Az egyik kerek forog, a masik mar regen all. Persze, ez a szepsege az egesznek! -
Janos250
őstag
Nem kell megijedni az elnevezésektől, a dolog nem annyira bonyolult.
A P típusú szabályozást már leírtam: mikor közeledsz a célhoz, lassítasz (elvileg a céltól való távolsággal arányosan).
A PI pedig a P kiegészítve I-vel.
Az I se ördöngősség: ha egyszerűen akarunk fogalmazni, akkor az átlagot tartja. Például a sebesség alapján összegzed ("integrálod") a megtett utat, és ha az óhajtott sebesség alapján az "elvárt" alatt van, akkor gyorsítasz, ha felette, akkor lassítasz. Mondhatnám úgy is, hogy átlagsebességet tartasz úgy, hogy ha egy kicsit lassabban mentél a vártnál, akkor egy kicsit fölé mész (és fordítva), hogy az átlag kijöjjön.
Bár, én itt az I szabályozás bevetését nem gondolom, hogy szükséges lenne, persze lehet. Én egy sima, a céltól való távolság csökkenésével arányos sebesség csökkenést javasolnék továbbra is. Ezt nevezik P szabályozásnak.
Szakiknak: nyugi, tudom mi a P, D, I szabályozás, de próbáljátok meg egyszerűbben elmagyarázni. Tőlem ennyi tellett -
Gergosz2
veterán
A probléma elég bonyolult. Én a következők végigzongorázását javaslom:
Legyen egy legbelső PI típuső áramszabályozás ami fordulatszám szabályozásnak van alárendelve. A fordulatszám szabályozás szintén PI típusú. A legkülső szabályozó kör pediglen a pozíciót szabályozza, amire elég egy P szabályozó. De a pontos beálláshoz ez sem elég, mivel szinte biztos, hogy pozíciószabályozásnál változó erősítés kell.
-
tvamos
nagyúr
Akkor még az a baj, hogy a dc motornak is ingadozik a nyomatéka, akár egy körülfordulás alatt is. Van olyan videóm is, amin a levegőben van a robot.
Én próbáltam fékkel, fék nélkül... PID-del persze jobb, de a compass volt a megoldás a gondnoka nekem.(Van egy Nikon 1-em, adott, hogy levideózok mindent.)
(#4557) Teasüti válasza aryes (#4551) üzenetére
Mindnek megcsúszhat a kereke, és ami megcsúszhat, az meg is csúszik. Annak is, ami lassan megy. -

Teasüti
nagyúr
Egy másik berendezés kikapcsolására? Paraszti logikám szerint éppen nem lefelé kéne esnie a fesz.-nek. Meg miért nem esik le minden alkalommal?
Na meg úgy tudom, ha alulfeszt kap, akkor reset van. De ez úgy meghülyül, hogy csak a teljes áramtalanítás segít rajta.
Másrészt meg éppen ezért raktam be a 100 uF-os kondit. A tápnak le kéne reagálni annyi idő alatt, amíg az kisül. Nos, legalábbis ez az elképzelés.De jogos észrevétel, kipróbálom majd usb-ről meghajtva is. De ekkor nem tudom leárnyékolni, hisz ki kell vennem a dobozból a Nano-t.
Esetleg még azt tudom kipróbálni, hogy berakok egy-egy diódát minden port elé, ami kimenetre van állítva.

Bemenetekre ellenállást, bár a kapacitív érzékelőn kívül minden porton van vmekkora ellenállás. 220 Ohm a szalagok adatbuszai felé és 1k a táp TTL jelszintű vezetékeire. Ezeknek nem kéne megfogni egy ESD-t?
Akkor is levágta mondjuk, ha csak a táp vezetékei voltak rádugva, bár ez nem zárja ki, hogy a lehúzott vezetékekről nem jön be semmi alapesetben.MÁS: ekkor mi történik a résoptóban? Félig lát át a tárcsán és a "lebegés" közepette dobálja a jeleket?















 hYAAOSw44BYLA5r
hYAAOSw44BYLA5r YkAAOSw5cNYHZx4
YkAAOSw5cNYHZx4















Új hozzászólás Aktív témák
 ekkold
ekkold- Kormányok / autós szimulátorok topikja
- NVIDIA GeForce RTX 5070 / 5070 Ti (GB205 / 203)
- Casco és kötelező gépjármű felelősségbiztosítás
- Androidos fejegységek
- Mibe tegyem a megtakarításaimat?
- exHWSW - Értünk mindenhez IS
- BestBuy topik
- Tőzsde és gazdaság
- Mobil flották
- Path of Exile (ARPG)
- További aktív témák...
- Gigabyte Gaming A16 CVHI3HU894SD (Bontatlan)
- Samsung Fold 5, gyöngyházfehér színben, szép állapotban!
- iPhone 15 Pro MAX 256 GB, fekete, hivatalos garancia, 92% akku, tökéletes állapotban!
- újszerű iPhone 16 Pro Max 256GB natural titanium natúr titán független Apple garancia
- Precision 5560 15.6" FHD+ IPS i7-11850H RTX A2000 32GB 512GB NVMe ujjlolv IR kam gar
- BESZÁMÍTÁS! ASUS ROG Z790 i9 14900KF 32GB DDR5 1TB SSD RTX 5070TI 16GB NZXT H6 Flow RGB 1200W
- Sima Vs.Windows Logitech Mx keys s plus és hagyományos Mx keys magyar bemutatása. Új videó linkel
- BESZÁMÍTÁS! MSI B760 i7 14900K 32GB DDR5 1TB SSD RX 9070 XT 16GB ASUS TUF Gaming GT501 CM 750W
- Bontatlan Lenovo T14S WUXGA Touch Ryzen5 Pro 7540U 16GB 256GB Radeon 740M Win11 Pro 3év Garancia
- 14" Dell Latitude laptopok: 5400, 5480, 5490, 7480, E6410, E6440, E5450 / SZÁMLA + GARANCIA
Állásajánlatok

Cég: Laptopműhely Bt.
Város: Budapest

Cég: PCMENTOR SZERVIZ KFT.
Város: Budapest