Hirdetés
- Luck Dragon: Asszociációs játék. :)
- GoodSpeed: 3I/Atlas: Üstökös vagy idegen civilizáció űrhajója?
- Sub-ZeRo: Euro Truck Simulator 2 & American Truck Simulator 1 (esetleg 2 majd, ha lesz) :)
- GoodSpeed: Haworth Aloha – egy nemcsak szavakban ergonomikus szék
- D1Rect: Nagy "hülyétkapokazapróktól" topik
- ubyegon2: Airfryer XL XXL forrólevegős sütő gyakorlati tanácsok, ötletek, receptek
- gban: Ingyen kellene, de tegnapra
- gerner1
- eBay-es kütyük kis pénzért
- GoodSpeed: Nem vénnek való vidék - Berettyóújfalu
-

LOGOUT
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-

cog777
őstag
válasz
 Ton-ton
#23869
üzenetére
Ton-ton
#23869
üzenetére
UNO Q eleg jo cucc, pont gondolkodtam egy AI-s kameras megoldason, de az ESP32-ben nincs eleg szufla, erre most osszelegoztak az ARM procit az STM32-vel + AI kepes GPU + emmc. Megvan a karacsonyi kockulos ajandekom.
Ja, amugy a Sonnet 4.5 AI segitett atkonvertalni az ArduCam OV2640 c++-os drajveret Micropythonra ESP32-hoz. Jelentem, mar mukodik kisebb felbontasban, de meg debuggolnom kell magasabbon. Ha valakinek kell, szivesen megosztom, kesobb csinalok neki public Github projectet. -

Postas99
őstag
válasz
Ton-ton
#23748
üzenetére
Ha visszaolvasol, írtam már, hogy a szervo sajnos nem pontos, legalábbis erre a típusú vezérlésre azzal a lib-el amit használtam nem jó.
2 perc után másodpercenkénti oda-vissza mozgásnál egy idő után driftel. Ha a servo túlszalad a két végponton akkor vagy kihúzza a tüskét a foglalatból és innetől kakukk a vezérlésnek, vagy túl feljebb tolja a tüskét és a végén vagy eltöri a szemen levő műanyag lapot vagy túlfeszíti a szemet a két oldalsó felfüggesztésnél és akkor az fog eltöni. A rosszabbik eset, hogy túltolás esetén megakad a drót a felső "plafonban" és meggörbül a drót és akkor már kis sem lehet húzni. Pofonegyszerű a mechanika: a súly lent van a szem meg 90 fokban merőlegesen ezen, ha a be akarom csukni, a súlyt fel kell tolnom és a forgáspontnál a szem elfordul mintha becsukódna.Tehát vagy max 60 db oda-visszát csinálok és számlálom hogy mennyi volt majd leállok, szétszedem az egészet és újra kalibrálom, ezt nem szeretném. Ezért lett a léptető motor , ami viszont nem gyors. Most marad ilyen és gondolkodom valami update verzióban.
A szemeket pedig fehér fénnyel lehet hátulról (belülről megvilágítani )jól kiemelni ami még ijesztőbbé teszi a szemeket.
A cél az volt hogy megvalósítsam azt amit még mások nem tettek meg ilyen módon, vagy legalábbis én még nem találkoztam consumer termékeknél ilyennel (home made). Ez egy Halloween prop nem több, megpróbálom kihozni belőle a legjobb megvalósítást amit elképzeltem. A feladat úgy is csak annyi hogy ne a sablonos dolog legyen amit már milliószor láttam máshol, másnál hanem egy teljesen szokatlan "ijesztő cucc: egy horror baba"
-
Postas99
őstag
válasz
Ton-ton
#23746
üzenetére
Ebből a motorból nem csak 1 de 2 darab már túl nagy hogy a baba fejébe beférjen. Ez a baba nincs több mint 50cm magas. Jó lenne, csak más baba fejbe. Az egész baba fejének a szélessége nincs 10cm.
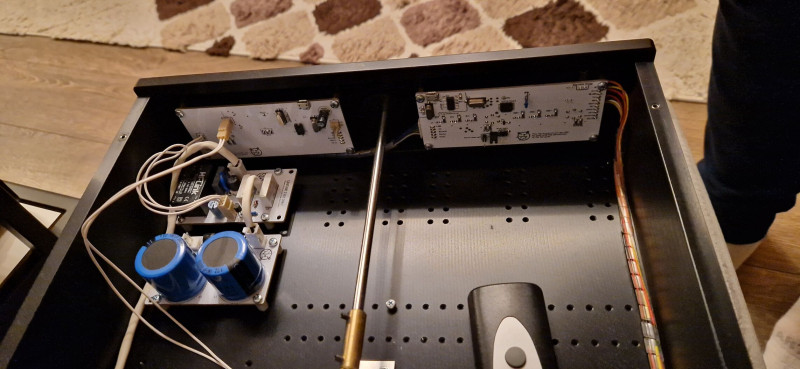
A vezérlés: [itt] a második képen látod, hogy a motor tengelyére van rá téve egy elliptikus műanyag illesztő, és ennek az egyik pontjára van betéve egy fém drótszál. A Drót ahogy elfordul a motor tengelye az elliptikus mozgás végett felfe vagy lefele fog mozogni. A szem persely alulról meg van fúrva, hogy a drót bele menjen. Viszont a ez nem egyenesvonalú mozgás ezért a sebesség limitált. Ez a mikro stepper pedig max 20 RPM-et tud tévesztés és rángatózás nélkül, ez most ki van hegyezve a csúcsra, nem is játszottam tovább vele.A szervíz üzemmódot írtam meg először. Minden érték elmentve de ha kell akkor újra tudom programozni a min, max értékeket. A szemnek két végállása van. Ha menetközben leállna a szervó bármi oknál fogva, akkor amint áram alá kerül a nyitott pozícióba fog térni minden esetben, és figyeli az utolsó állapotot is. Tudja hogy hol tartott a pozicióban.
-
Postas99
őstag
válasz
Ton-ton
#23733
üzenetére
A táplálás most jelenleg egy labor tápról megy 12V-al. Erre van bekötve egy DC-DC stepdown konverter fix 5V-os kimenete. A motor egy 28BYJ-48 (átmérő 28mm) és hozzá a szokásos ULN2003-as vezérlő. Mondjuk ez még csak az egyik ág még egy ugyanilyen lesz benne.
Akkor nem izgulok, hogy a motor tönkre menne. Tegnap szembesültem azzal, hogy a másik baba szemei nagyobb méretűek, így rendelnem kellett nagyobb szemeket. Az eredeti szemek ebben a babában félig fémházasak de sajnos nem felhasználhatóak a projkethez , mert az alsó himba megoldás egy kalap kakát nem ér, nem olyan mint a műanyagházas összeszerelésű szemeknél, mivel az alsó szár megoldása eltér az eddigitől. -

Janos250
őstag
válasz
Ton-ton
#23726
üzenetére
"Persze ha két processzormag van,...., de ahogy elnéztem az sem túl egyszerű arduino-s szoftverkörnyezetben"
De!
A két mag kezelése egyszerű arduinos környezetben!
A probléma az, hogy mindkét magon vannak megszakítások.
Ezért jobb a hardveres megoldás, mert azt semmi nem zavarja. -
Postas99
őstag
válasz
Ton-ton
#23721
üzenetére
Szia!
Köszönöm ha foglalkozol vele.
A gyakorlat nálam az, hogy ESP32-D0WD3 (ESP32 Developer board) de van itthon C3, S3, és még vagy 3 fajta ESP32 modulom, mindegyiken több azonos kódot kirpóbálva a fentebb írt jelenség fordult elő nálam, ami lehet pusztán a nem megfelelő library használata is.
Mindenesetre már itt van az asztalomon a 28BYJ-48 meg a vezérlő board hozzá. Holnap kapom kezembe a nyomtatott tartót amit be tudok tenni a baba fejébe.
Majd arról is csinálok videót.
Most elsősorban kellene egy nagyobb méretű akksi amit belegyömöszölök a baba testébe, vagy marad a 12V-os táp és hozzá egy fix DC-DC konverter.
2 db léptető motorral van az új tervezve - régi 2 darab szervó
1 db MP3 hangmodul babánként - hangszóró.
Ez is megér egy misét, mert a kiskínai legalább 7 különböző vezérlővel gyártotta már a DFPlayer mini klónt is a legtöbbnél nem kell CHKSum mert behal a lejátszás. 2 modulom vna itthon ebből és az egyik egy kukkot nem szól a másik random lehal bizonyos időközönként, ezért rendeltem az új fejlesztésű jobbminőségű kínai modellből amin van 8MByte flash és 20W-os erősítő, és rendeltem eredeti DFPlayer Pro-t is amin van 128MByte flash, majd elválik melyiket hova fogom felhasználni.Szóval ezek így energia vámpírok. Tehát kell valami jófajta táplálás is részére.
Az idei 2 új projekt halloweenre amúgy is eltér a többitől.
1, hintaszék vezérlés távolságtól függően random szövegek és egyre gyorsabb mozgatás, ebben ül majd egy mackó aki füstölögni fog.. Vape cucc hozzávaló kismotorral ami nyomja a füstöt majd.
2, 2 db Creepy baba mozgó szemekkel és énekléssel gyerek hanggal.
A baba már 2 éve a fejemben van, csak nem volt aki legyártsa részemre a megfelelő mechanikát.3, Még lenne egy koponya ami beszél mozgó állkapoccsal. Ez nem túl eredeti csak megfogott az ötlet.
A sokdaik öltlet a rángatózó hullazsákos hullák, amihez a solenoidos megoldás a legjobb.
Közben megjött az új beteg ötlet a fejemben, műhó fújó előállító gép.. ez most 16e HUF aliról rendelve... de nem sima fehér havat akarok előállítani hanem pirosat. Ehhez reményeim szerint elegendő piros ételfestéket keverni az anyagba. Csak ötlet de nem ismerek olyat aki ellenőrizné nekem a feltevést hogy lehet piros "havat" előállítani vele.
Az eddig elkészült cuccok is teljesen mások voltak mint az átlag joe félék
-

Wolfram
aktív tag
válasz
Ton-ton
#23096
üzenetére
Szia,
Piszkálgattam még egy kicsit, és azt láttam hogy nem tud megfordulni.
Clockwise szépen lehet léptetni előre, de amikor egy ellentétes irányú parancsot adok ki, csúszik a kuplung néha szabad szemmel is látni hogy kihagy, egyhelyben rezeg egy darabig mire elindul a mozgás visszafelé.
néha szabad szemmel is látni hogy kihagy, egyhelyben rezeg egy darabig mire elindul a mozgás visszafelé.Egyenlőre ezt a steppert feladtam, és majd egy MG90D-vel folytatom ha megjön.

-
Wolfram
aktív tag
válasz
Ton-ton
#22756
üzenetére
Tehát akkor ezt fizikailag meg kell érinteni, olyan hogy műanyag doboztetőre rápingálok egy gombot, és alá rakok valamilyen fémet az nem életképes.
A csavar életszerűnek tűnik, de ahogy nézem, csiszolás után az érintő felület túl kicsi lenne. ~1cm sugarú kör lenne az ideális.
-
#21953
 gordonfreemN
addikt
Ton-ton
#21947
gordonfreemN
addikt
Ton-ton
#21947
gordonfreemN
addikt
válasz
Ton-ton
#21947
üzenetére
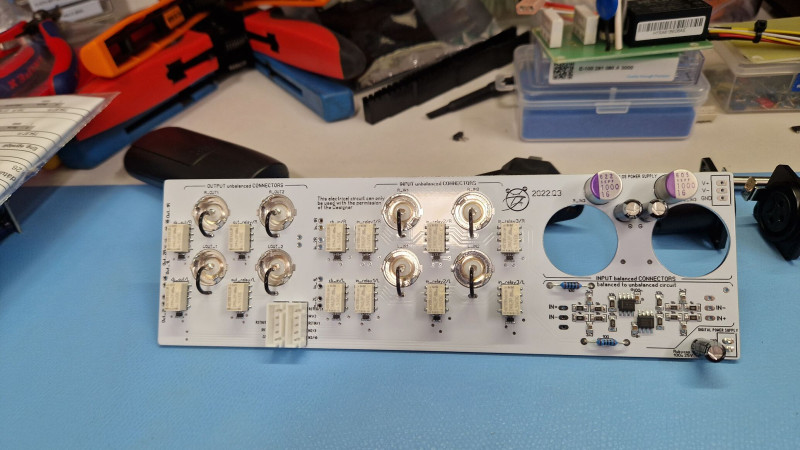
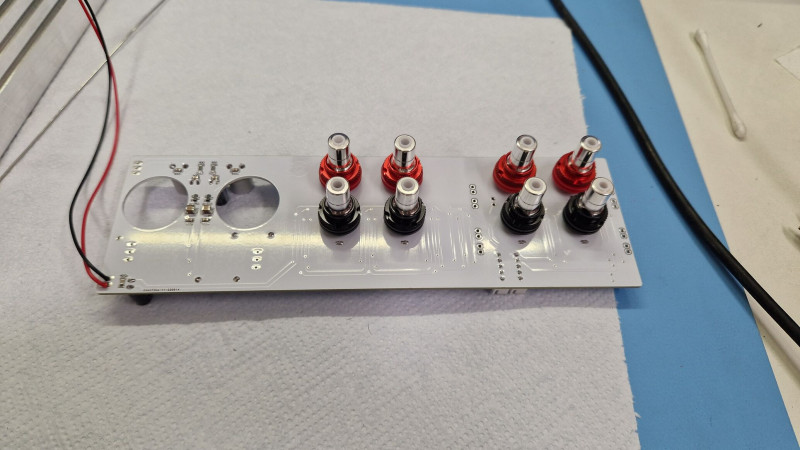
Köszönöm az illusztrációkat a képekkel és a tanácsokat. Teszek fel képeket, közelebb hozom vele kicsit az elképzelést:

Aryes:: közben... igazából az RX-TX-et nem is kell leválasztani, az mehet párhuzamosan valami kimenethez, ami nem zavarodik össze feltöltéskor az rx-tx vonallal
-
#21915
gordonfreemN
addikt
Ton-ton
#21914
gordonfreemN
addikt
-
#21913
gordonfreemN
addikt
Ton-ton
#21910
gordonfreemN
addikt
válasz
Ton-ton
#21910
üzenetére
Nem. Bipoláris relé, impulzussal vezérlem. Hogy rajta lehetne-e hagyni a vezérlőjelet? Nem tudom, mindenesetre szerintem nem illik, meg az még egy harmadik panelen van és azt már végképp nem szeretném előlről kezdeni. Az már anyagilag végképp fájna.
Postas99: Valószínűleg igazad van, de épp azért "kattantam" rá az MCU-ra, hogy ne kelljen ilyen multiplexer féle logikai IC-ket használnom. Aztán persze most mégis pont ezért kértem segítséget... hgy mivel lehetne. Fontolgatom a lehetőségeket.
Ton-ton 21912: nem értem mire gondolsz ez alatt, miben segítene ez?
-
#21326
 razorbenke92
őstag
Ton-ton
#21325
razorbenke92
őstag
Ton-ton
#21325
válasz
Ton-ton
#21325
üzenetére
Lehet, hogy túltoltam, de a témaindító egy komplett lakás okosítása volt. A ledszalagok hangulatvilágításnak elmennek, de normál háztartási világítás esetén - amit az ember feltételez, ha villanykapcsolókról beszélünk - szinte biztos, hogy belefutni azokba a világítótestekbe, amikről írtam.
-

sonar
addikt
válasz
Ton-ton
#20851
üzenetére
Oké, ez nekem is világos, csak az egyes értékek és a PIN-ek közötti kapcsolat nem világos.
Pl.: én úgy látom, hogy a row pinek az 2-től 9-ig mennének és nem pedig ahogy tömbnél meg vannak adva
példa kód:
row[8] = { 2, 7, 19, 5, 13, 18, 12, 16};
szerintem:
row[8] = { 2, 3, 4, 5, 6, 7, 8, 9}; -

ekkold
Topikgazda
válasz
Ton-ton
#20746
üzenetére
Nagyjából mindegyik MCU-nak rosszabb a belső ADC-je, mint egy küldő A/D konverter. A többihez képest pedig szerintem nem rosszabb az sem ami az STM32-ben van. Használtam már néhány dologra BluePill panelt (STM32F103) és szerintem az A/D jobb mint ami általában az arduino (pl. nano) paneleken van. Ráadásul a nano 10bites A/D konverteréhez képest ez 12 bites, és még gyors is.
-

Undoroid
őstag
válasz
Ton-ton
#20465
üzenetére
Igen, ezt már ismerem és több darab 4csatornásom van is, de láttam pár helyen kapcsolási rajzokat, ahol a kijelzőt 5V-ról hajtották meg direktben! Nos, pont így nem szeretném kikészíteni az első Nokia-kijelzős projektem! Szerencsére kicsit késtek a megrendelt kijelzők és nem tudtam gyorsan kipróbálni az aktuális projektet, amivel biztosan kikészítettem volna rajz alapján valamit...nem jó így elkezdeni a tanulást...ezért olvasok előbb alkatrész adatlapot!
* * *
Amióta -még az elején- véletlenül kikészítettem az egyetlen UNO-m 6-os kimenetét, azóta sokkal óvatosabb vagyok! Késő volt, fáradt voltam, de a lelkesedés nagy volt...az eredmény várható volt.

-
válasz
Ton-ton
#20465
üzenetére
Ez csak i²c-hez szükséges! A kijelzőnél egyirányú a kommunikáció, a hex buffer pont elég hozzá. Bár árban / méretben nem tudom melyik a praktikusabb, lehet az egyszerű ellenállásos verzió is megteszi, de azt én nem merem ajánlani, mert egy ilyen Nokia kijelzőt már régebben kinyírtam szintillesztő IC nélkül.
-
válasz
Ton-ton
#19138
üzenetére
Milyen motor, mekkora áramfelvétele van és milyen tápról (hány volt) menne? 2 méter nem nagy távolság, igazából egyik megoldásnál sem okozhat problémát, de ha nagy áramokról van szó, akkor esetleg túl vastag vezetékekre lenne szükséged a driver és a motor közt. Szerintem amelyik végéről egyszerűbb a tápot adni, oda tedd a drivert, hogy ne kelljen annyi vezeték.

-

t72killer
titán
válasz
Ton-ton
#18361
üzenetére
, szem előtt tartom ezt is. Közben visszatereltem magam a 16340-es megoldáshoz. Összességében kicsit drágább, de ezzel usb-tölthető kütyüket tudok generálni.ON: ESP-01s programozásához USB-s kütyüt használnátok vagy az arduino nano is ugyanolyan jó lesz? (uno-s példa itt a 6-7.oldalon)
-
-
Janos250
őstag
válasz
Ton-ton
#17006
üzenetére
"Sikerült találnom egy piaci rést"
Az jó, csak ha 2-3 évbe telik, mire megcsinálod, nehogy más előbb megcsinálja, és befurakodik abba a résbe.
Nekem is volt fiatal koromban, hogy amikor megtaláltam egy rést, addig szerencsétlenkedtem, míg más furakodott be abba a résbe!Egyébként, a több választható megoldás közül természetesen azt válaszd, ami neked kedvesebb, mert annak elkészítéséhez nagyobb lelkierőd lesz, és az nagyon fontos!
Hajrá, akár ilyen, akár olyan megoldással. -
Janos250
őstag
válasz
Ton-ton
#17006
üzenetére
Nem erőltetem, te látod át az egészet, csak érveket mondok. Ha csuklós karral végzed, akkor is ugyanannyit kell ott tölteni. Persze biztosan vannak a robotkarra is bevált, kidolgozott, publikált megoldások, hogy hogyan lehet transzformálni X,Y,Z-ből a kar nagyjából polár koordinátaira, hiszen a robotkar már régóta alkalmazott megoldás. Ezt a részét nem ismerem, lehet, tényleg egyszerű.
-
Janos250
őstag
válasz
Ton-ton
#16998
üzenetére
Ez olyasmi, mint a jelenleg is alkalmazottak közül pl. a panelokra alkatrészeket beültető robot, vagy ami pár patikában van, gyógyszert kiszedő automata.
Pár megjegyzés, de természetesen te döntesz, én csak azt mondom el, én hogyan csinálnám.
A legjobban akkor jársz, ha nem forgó mozgást végző robotkarral, hanem derékszögű rendszerrel dolgozol. Ebben az esetben az ortogonális (az egyik megváltozása nem vonja maga után a másik változását) adatok kezelése sokkal könnyebb.
Elkészítesz megfelelő méretben egy 3D nyomtatóhoz hasonló, le-föl mozgó keretet, és arra csukló-nyagló kar helyett egy ilyen szisztémájú, derékszögben mozgó kart:
https://www.banggood.com/New-NEJE-Master-2S-30W-Powerful-Laser-Engraver-and-Cutter-2-In-1-Adjustable-Variable-Focus-Lens-and-Fixed-Focal-Laser-Support-Wireless-APP-Operation-or-32-bit-MCU-Banggood-Exclusive-World-Premiere-p-1778874.html
A keret megfelelő magasságra emelkedik, az X tengelyen a kar megfelelő X pozícióba áll, majd az Y kar benyúl a megfelelő helyre. Persze a kar végén nem egy lézer fej van, hanem egy Z irányban mozgó újabb kar, a végén a csőrrel, ami megfogja pl. a gyógyszeres dobozt, felemeli, és onnantól kezdve már mehet vissza, és a megfelelő, helyre lerakja, leejti, attól függ, hogy ez csak gyűjtés, vagy beillesztés. A csőrt Z irányban mozgató kar akár el is hagyható, a keret mozgatásával kiváltható.
Ez esetben a PI végzi a számításokat, a GRBL adatok generálását, a RAMP-on lévő Mega a saját (Arduino, vagy egyéb) programjával a kapott GRBL adatok alapján vezérli a léptetőmotorokat.CAD céljára én a Fusion 360-ot használom, mert annak van ingyenes verziója, bár azt csak magán célra szabad használni. Minden relatív benne, korábbi síkokhoz képest, a maga előnyeivel és hátrányaival.
-
válasz
Ton-ton
#16990
üzenetére
Értem, mire gondolsz. Viszont a stepper vezérlés a fenti hardverrel is indirekt módon történik, tehát nem közvetlenül küldi a léptető impuzusokat (pwm), hanem az i2c buszon regisztereket tölt fel, irány és sebesség adatokat küld. Ez persze nem zárja ki az időzítési problémákat, de valószínűleg mégis működik a módszer, különben nem létezne a fenti hardver.
-
Janos250
őstag
válasz
Ton-ton
#16973
üzenetére
A Ramp az jó, bár Megaval megy, de nem tudok olyan, nagy szériában gyártott panelről, ami korszerűbb procival (STM, ESP) megy. Utólag szokták hozzá mókolni az ESP8266-ot, akinek kell.
A programodat hova akarod tenni? A RAMP Megájába? Vagy külön panel lesz rá?
USB ügyben elég gyenge vagyok.
"Esetleg tudnál compilert javasolni?"
Ha az Arduino IDE-t letöltöd, abban minden benne van, szőrötül-bőröstül.
Megnyomot a feltöltés menüt, és mindent elintéz.
Van olyan IDE, ami régebbi fordítót tartalmaz, de pl. az ESP32-höz ami van, az már tudja a C++11-et, bár az alapesetben nem szükséges. -
Janos250
őstag
válasz
Ton-ton
#16971
üzenetére
"Az arduino vezérelné a léptetőmotorokat (robotkar)"
Valamelyik korszerűbb Arduionot használd! Korszerű léptetőmotor vezérlő IC-vel! Pl. TMC 21xx, 22xx. Ne akarj vérd izzadni a nem elég korszerú eszközökkel.Minek ennyi USB? (WiFi, BT nem jó? nem törik el a madzag, nem fékez.)
"Egyáltalán jó helyen járok, vagy máshol kérdezzek?"
A PI részét itt szerintem kevesen értik, de az Arduinoban páran jól benne vannak.
"Programozás szempontjából mi lenne az ideális?"
Az Arduinot C++ nyelven programozzuk, ez biztosan ingyenes marad, jó fordítóval egyetemben.
Ez megy PI-n is.
Ha PHP-t használtál, akkor a C++ 1-2 óra tanulás, mert a PHP az tulajdonképpen C++ kiegészítés. (Na, jó, nem teljesen, de majdnem).






 néha szabad szemmel is látni hogy kihagy, egyhelyben rezeg egy darabig mire elindul a mozgás visszafelé.
néha szabad szemmel is látni hogy kihagy, egyhelyben rezeg egy darabig mire elindul a mozgás visszafelé.
















 Már azon túl, hogy gyors.
Már azon túl, hogy gyors.



Új hozzászólás Aktív témák
 ekkold
ekkold- Dell Precision 3560 - Core I7-1165G7, 32GB ram, Nvidia T500, Vil.magyar bill, 12 hó gar.
- Lenovo IdeaPad Slim 3 16ABR8 Ryzen 5, 16GB RAM, 512GB SSD, dedikált grafika, garanciás
- Hp Zbook Fury G7 " Gyári magyar Bill " Sok - Sok darab!!!!
- Bomba áron GIGABYTE G5 /I7-13620H 16GB 1 TB SSD Nvidia RTX 4050 6GB 144 Hz FHD IPS
- Honor Pad X8 / 4/64GB / Wi-Fi / 12 Hó Garancia
- Lenovo Legion Pro 5 (16" QHD+ 240Hz, i7-14700HX,RTX 4070 8GB, 32GB RAM,1TB SSD) eladó BeszámítOK
- Samsung Galaxy S21 Ultra 5G / 12/256GB / Kártyafüggetlen / 12Hó Garancia
- 174 - Lenovo Legion Pro 7 (16IAX10H) - Intel Core U9 275HX, RTX 5070Ti (ELKELT)
- Xiaomi 15 Ultra Silver Chrome 120 Hz WQHD+ LTPO AMOLED, Leica 1 + 200 MP periszkóp 16/512 GB
- Új monitor állvány- elegáns megoldás a dupla A/4-es papírcsomag helyett - csak össze lett szerelve
Állásajánlatok

Cég: Laptopműhely Bt.
Város: Budapest

Cég: PCMENTOR SZERVIZ KFT.
Város: Budapest