Hirdetés
- gban: Ingyen kellene, de tegnapra
- Luck Dragon: Asszociációs játék. :)
- GoodSpeed: 3I/Atlas: Üstökös vagy idegen civilizáció űrhajója?
- sziku69: Szólánc.
- GoodSpeed: Nem vénnek való vidék - Berettyóújfalu
- Luck Dragon: MárkaLánc
- Brogyi: CTEK akkumulátor töltő és másolatai
- Meggyi001: Kórházi ellátás: kuka vagy finom?
- Meggyi001: A kérdés...
- Sub-ZeRo: Euro Truck Simulator 2 & American Truck Simulator 1 (esetleg 2 majd, ha lesz) :)
-

LOGOUT
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
-
#5440
 tvamos
nagyúr
razorbenke92
#5439
tvamos
nagyúr
razorbenke92
#5439
tvamos
nagyúr
válasz
 razorbenke92
#5439
üzenetére
razorbenke92
#5439
üzenetére
Ezért, ha valamikor céleszközt terveznek, kevésbé bevett szokás a rádiofrekvenciás procikat lepakolni a nyáktervre. Ehelyett inkább a moduloknak a footprintjét teszik le, és azt úgy forrasztják be
Ez attól függ, milyen mennyiség lesz a gyártás. Mi a Munkahelyen nem modulokat használunk, mert 100 ezres darabszámnál nem éri meg, ott már érdemes megfizetni a költségeket, ami kifejlesztés, meg a hivatalos tesztelés, jóváhagyás. (Csináltam már.)
marginális a nyákterv
Gondolom úgy érted, hogy nem marginális, tehát nagyon fontos.
-
tvamos
nagyúr
válasz
 Janos250
#5436
üzenetére
Janos250
#5436
üzenetére
Amit én tudok, HM-10: Bluetooth LE 4.0 modul, kedvesebb áramot vesz fel, de az nem ment a regi laptopommal, kellett vanni egy USB-BT4 sticket. A HC-06 Bluetooth 2.0 with EDR, ez több áramot vesz fel. Ha jól olvasom a doksit, akkor van ennek a BT LE-nem valami aktív standby módja, vagy mi a szösz, hogy kapcsolatban marad a host-tal, de mégis alig vesz fel áramot. A 2-es modult ki kell kapcsolni.
Ha jól olvasom, az eredeti HM-10 CC2540, vagy CC2541, akkor nagyon rossz nem lehet, használtam már a csipet, csak mi nem bt-re, mert ott ugye fizetni kell royalty fee-t, azt meg nem szeretjük.
Jut eszembe, van, amit node-nál, host-nsk is lehet beállítani, van, amit csak egyiknek, de most még nem mondom... -
tvamos
nagyúr
válasz
Janos250
#5431
üzenetére
Nekem nem nagyon valtak be ezek a kinai modulok. Kicsi a hatotav, nagyon erzekeny a zajra, (pl kis villanymotorok,) folyton eldobalja a kapcsolatot, es nem csatlakozik vissza.
 Amugy a HC-06 jo lenne.
Amugy a HC-06 jo lenne.
Ennek mondjuk ellentmod, hogy a multkor kaptam egy 4.0-as modult az ST-tol, az jo, csak most nem talalom... -
-
tvamos
nagyúr
Ez? Mert ennek nem tul analog a kimenete. Pull-up nelkul kell digitalis bemenetre kotni.
When receiver receive the return infrared light, the receiver end will connected through, E ends will output high TTL, which close to Vcc value, if not the E ends output low TTL close to GND.
In the cases of real life, we can use MCU to scan E end to check the status
Persze, ez meg veletlen sem TTL kompatibilis, de az mindegy is, az MCU-d bemenete ugysem TTL..."Mi történik akkor, ha egy olyan lábon olvasok analóg értéket, amin van egy aktív pinChange interrupt? Ezek összeveszhetnek egymással? Vagy tiltsam le az interruptot az olvasás idejére aztán állítsam be újra?"
Nem csinaltam meg ilyet, de szerintem ez nem tul jo otlet. Bar, akar mukodhet is, nem neztem az adatlapot, hogy pontosan hogyan zajlik az AD konverzio. -
tvamos
nagyúr
Szerintem nem mukodne igy stabilan. Nem szokott ennyire pontos ertek lenni az a felhuzo ellenallas, meg a bemenet sem teljesen pontos, es van neki egy kis homerseklet fuggo leakage-e, meg driftje. Raadasul, ha nem schmitt trigger, akkor a komparalasi szint kozeleben nem kell, hogy stabilan mukodjon, akar kapcsolgathat is ide-oda egy kicsit.
En tennek oda valami kulso hiszterezises komparatort, vagy schmitt triggert, vagy kotnem analog bemenetre. -
#5194
tvamos
nagyúr
leventekov
#5192
tvamos
nagyúr
válasz
 leventekov
#5192
üzenetére
leventekov
#5192
üzenetére
Ilyen hosszu kodot lehet, hogy jobb lenne, ha mondjuk a pastebinre tennel fol, es itt csak linket osztanal meg.
Amugy lehet, akkor mukodne, ha az oraval nem statikusan kapcsolnad be, meg ki, hanem csak akkor, amikor az allapota valtozik az oranak, akkor valtoztatnad a kimeneti statuszt.
-
tvamos
nagyúr
válasz
 gyapo11
#5160
üzenetére
gyapo11
#5160
üzenetére
Az van kiirva, hogy "Ardunino topic"! Nincs kirva, hogy ez NEM a "ki csinálja meg nekem pénzért" topic, tehat az o kerdese szerintem hatareset. Lehet, hogy jobb helyen lenne a apron? Nem tudom, de hogy ott tuti nem talalna meg senki, az biztos.
A magam reszerol nem tudom, miert zavar ez barkit is. -
#5149
tvamos
nagyúr
gyenesmartin
#5148
tvamos
nagyúr
válasz
 gyenesmartin
#5148
üzenetére
gyenesmartin
#5148
üzenetére
Hiába double az y, az x int, és ezért az x*x*x*x-et int-ben fogja számolni. Legyen inkább az x is double!
-
#5146
tvamos
nagyúr
gyenesmartin
#5144
tvamos
nagyúr
válasz
gyenesmartin
#5144
üzenetére
int-tel nem lehet jó, 65^4 több, mint 17 millió. Az x-et lebegőpontosra kell venni.
-
tvamos
nagyúr
Arduino STAR OTTO board with STM32F469BIT6 MCU and Wi-Fi connectivity
Remelem, jobb lesz majd a tobbi STM32 tamogatasa is! -
#4923
tvamos
nagyúr
DrojDtroll
#4922
tvamos
nagyúr
válasz
 DrojDtroll
#4922
üzenetére
DrojDtroll
#4922
üzenetére
Szép szkóp!
-
#4900
tvamos
nagyúr
DrojDtroll
#4899
tvamos
nagyúr
válasz
DrojDtroll
#4899
üzenetére
Régen azzal nyomtam, nem volt semmi gond. Ment minden frankón.
-
tvamos
nagyúr
Pedig piszok egyszeru. Van benne egy LED, (vagy ketto antipatalel,) amit egy ellenallason keresztul rakotsz parhuzamosan a lampadra. A kimenete meg egy fototranzisztor, amit egy felhuzo ellenallassal rakotsz az arduino bemenetere. A LED, meg a fototranzisztor kozott galvanikus elvalasztas van, igy nem fog megrazni.
En H11AA1-et hasznalok, mert nekem abbol van egy osszemarekkal itthon. Namost azt nem tudom, hogy nalatok, az elektronikai boltban milyet arulnak. Ez pl. remelhetoleg eredeti.
Itt egy tuti kapcsolas, en is igy csinalnam.
Namost az egesznek az a problematikaja, hogy ez egy 100Hz-es frekvenciaju, kozel negyszogjelet fog eloallitani, (valamekkora duty cycle-lal,) azt mondjuk software-bol siman ki lehet szurni.Az erdekes megoldasok nem itt kezdodnek!.. Ez egy sima alapkapcsolas.
-
-
tvamos
nagyúr
válasz
 Teasüti
#4884
üzenetére
Teasüti
#4884
üzenetére
Az a baj, hogy semmi debug nincs, es nem is latszik, hogy lenne valami, igy meg az egesz fejlesztes... eleg foscsi. Van valami ingyenes, meg nem hasznaltam, mert nekem a ceges gepre nem lehetett installalni, de volt egy napos kurzus az ST-nel hozza.
(Amugy nem ertem, mi a baj a kondkorlatossal, eleg komplex cuccokat lehet benne irni, nem fog a blink 11% flash-t megenni.) -
#4878
tvamos
nagyúr
DrojDtroll
#4874
tvamos
nagyúr
válasz
DrojDtroll
#4874
üzenetére
Terminal emulátor? Másik arduino?
-
tvamos
nagyúr
Mert nem draga, azt csinalok vele amit akarok, ugy, ahogy akarom, tudok menteni pendrive-ra, sd-re, sosem fogy ki a rendszer a szuflabol, amit pythonban egy linux gepen egyszeru megcsinalni, azt a Raspberry-n csinalom, amit meg C-ben tudok konnyen megcsinalni azt az STM32-n, raadasul van 10-12 PWM csatornam, ha kene meg egy, es az STM32-n az ADC kezelessel is azt trukkozok, amit akarok, + fejlesztes kozben rohadt jol lehet debuggolni mindket rendszert.
Arduinon meg rendes debug sincs.
-
#4814
tvamos
nagyúr
DrojDtroll
#4812
tvamos
nagyúr
válasz
DrojDtroll
#4812
üzenetére
Nagyon erdekel, hogy, s mint lesz! Remelem, majd megosztod velunk! Szurkolok, hogy sikeruljon.
(#4813) DrojDtroll válasza razorbenke92 (#4810) üzenetére
Filleres tetel egy Raspberry, es biztosan nem fogy ki a szuszbol. A PWM-eket, meg AD-ket is meg lehet oldani, aranylag konnyen. Naplozas, kommunikacio (soros, ethernet, wifi,) vele sima ugy, szinte mindenre van mar kesz projekt. (Gondolom nem sorozatgyartasrol van szo, hanem otthoni projekt, vagy legalabbis, valami egyedi cucc.) -
#4808
tvamos
nagyúr
DrojDtroll
#4807
tvamos
nagyúr
válasz
DrojDtroll
#4807
üzenetére
RS422-vel ilyen tavon ment nekem a 1Mbps, full duplex, zajos (ipari) kornyezetben.
(#4799) DrojDtroll válasza tvamos (#4791) üzenetére
Ez sajat design, vagy valahonnan le lehet tolteni 3d file-okat? Vagy hogy van ez? -
#4801
tvamos
nagyúr
DrojDtroll
#4799
tvamos
nagyúr
válasz
DrojDtroll
#4799
üzenetére
Piszok jó! Én STM32-vel csinálnám, ha nem kell wifi. (Ha kell, raknék mellé egy Raspberry Pi zerot.)
Szerintem ebben a projektben jól jönne egy gyorsulásmérő, úgyhogy olyan discovery-t választanék, amin van.(#4800) Teasüti válasza DrojDtroll (#4799) üzenetére
AC szervoval az annyira nem gáz. Léptető motorral... na az gáz!.. -
tvamos
nagyúr
válasz
Teasüti
#4796
üzenetére
Valahol itt beszél ilyesmiről: [link]
Ennyit látok:
Bootloader
Make sure there's a bootloader burned on your Arduino board. To check, reset the board. The built-in L LED (which is connected to pin 13) should blink. If it doesn't, there may not be a bootloader on your board.
-
#4791
tvamos
nagyúr
DrojDtroll
#4789
tvamos
nagyúr
válasz
DrojDtroll
#4789
üzenetére
Az lehet gond, ha ilyeneket csinalsz:
if(analogRead(A0)<400){
Serial.print(20-analogRead(A0)/20);
}
if(analogRead(A0)>600){
Serial.print(71-analogRead(A0)/20);
}Ha mondjuk igy csinalod, lehet, hogy boldogul vele proci:
int AnalogValue
AnalogValue=analogRead(A0)
f(AnalogValue<400){
Serial.print(20-AnalogValue/20);
}
if(analogRead(A0)>600){
Serial.print(71-AnalogValue/20);
}Maris csak egyszer olvasod az analog erteket, a program vegrehajtas allig tobb, mint fele ideig tart.
(#4789) DrojDtroll válasza Gergosz2 (#4788) üzenetére
Ez alig tobb, mint 50kHz, azt meg egy UNO-val is elo lehet allitani. A ket csatorna miatt kicsit necces... Ket UNO? Gondolom ket kulon freki kell.
Ez 2 leptetomotor? Valami kettengelyes koordinata cucc? Vagy hasonlo valami? Robot? Tavcso mozgato? Nagyon kivancsi vagyok!..

-
#4787
tvamos
nagyúr
DrojDtroll
#4785
tvamos
nagyúr
válasz
DrojDtroll
#4785
üzenetére
Inkabb tegyel Raspberry PI-t, meg Arduino-t. Az Arduino csinalhat PWM-met, meg AD-t neked. Akar kettot is tehetsz, a legolcsobb fajtabol. Akkor legalabb olyan cuccod lenne, amiben tudunk segiteni, meg van supportja ezer. Tuti eleg gyors lenne egy RPI3.
-
tvamos
nagyúr
válasz
Janos250
#4776
üzenetére
Annyira kicsi a kapacitás változás, hogy muszáj nagyon pontosan mérni.
18-20 éve még magát a szenzort vettük, és oszcillátor építettünk vele általában. Kell a pontos mérés. Meg a hőmérséklet kompenzálás. Meg a kalibrálás. (Piszok sokat kalibráltam.) Most tuti nem veszek olyat, amit otthon kell kalibrálni. (Max, ha más valaki kalibrálja, én csak előírom, mit kell csinálni.)
Annál ez sokkal egyszerűbb. -
-
#4728
tvamos
nagyúr
DrojDtroll
#4726
tvamos
nagyúr
válasz
DrojDtroll
#4726
üzenetére
Linuxra valami gnu compileres, eclipse-es játék van, így emlékszem. Elég nehéz úgy elindulni, hogy nem ismered se a controllert, de a környezetet, se support nincs.
-
tvamos
nagyúr
válasz
Janos250
#4676
üzenetére
Nem igy szoktam csinalni, hanem Cube MX-szel szoktam beallitani a timer-eket, pwm-eket, meg az analog i/o-kat. (Ha kell, akkor a dma csatornakat.) Meg van egy csomo peldaprogram, amikbol meg lehet tanulni mindent. Esetleg van stm32 forum is, ahol segitenek, ha kell, de azt meg nem kellett hasznalnom.
En ilyeneket nem irogattam mar 8 eve.
(#4673) DrojDtroll válasza tvamos (#4672) üzenetére
Ha nem feltetlen surgos a dolog, en nem kuzdenek vele. Janos250 szokott ajanlani olyan armos stm32 procis boardokat, amik jol futnak arduino alatt, ha ragaszkodsz a framework-hoz, majd megjon kinabol, elobb-utobb.
Esetleg, ha nem gond, hogy tobb penzt kell raszanni, akkor van a Teensy 3.2 & 3.1.(#4677) Janos250 válasza DrojDtroll (#4673) üzenetére
Hat azt csak akkor, ha nagyon kell neki a kihivas, mert a nagy kuzdelemnek ketes a kimenetele. -
#4675
tvamos
nagyúr
DrojDtroll
#4673
tvamos
nagyúr
válasz
DrojDtroll
#4673
üzenetére
En nagyon keveset hasznalok Arduinot, epp csak a nagyon alap dolgokat. Ha barmi tobb kell, akkor ARM-ot.
Ugy emlekszem, hogy az analog read megvarja a konverzio veget, szoval amig az ad dolgozik. Ha magad csinalod, akkor meg lehet azt csinalni, hogy elinditod a konverziot, csinalsz valami mast, majd visszamesz kiolvasni, es uj konverziot inditani.
Vagy lehet azt is csinalni, hogy megszakitasbol folyamatosan olvasod az osszes bemenetet, es amikor az analog read-et irnad, csak kiolvasod a megfelelo regisztert.
En ezeket a modszereket hasznaltam regen, az assemby korszakban, amikor meg programoztam is. -
#4672
tvamos
nagyúr
DrojDtroll
#4667
tvamos
nagyúr
válasz
DrojDtroll
#4667
üzenetére
Persze, egy csomoszor. En STM32 nucleo 64 boardokat szoktam hasznalni, mert azokra ra lehet pattintani az Arduino shield-et, ami jol jon, ha van par monster moto shielded, meg solder breadboard shilded.
Mondjuk az arduino frameworkrol leszoktam, mert van a gepemen IAR, es ott megy a debug rendesen. Az STM Studio pl. rohadt jo, latod a kulonbozo baltozokat a kepernyon, hogyan valtoznak. Itt a videon mondjuk Keil van, de bemutatja, mit lehet az STM Studio-val alkotni. Popec! [link] -
tvamos
nagyúr
Jó amit linkeltél, csak nem elegendő, és felületes ahhoz, hogy megértsd a villamos gépek működését.
Idézek belőle: "Az egyenáramú motor működése a mágneses pólusok vonzásán és taszításán alapul."
Ez igaz is.Rossz, a hasznos teljesítményre hátrányos indukció pedig sajnos létezik.
Persze, hogy van olyan indukció, ami nem hasznos, de legyen az akár motor, akár generátor, a működése az indukción alapszik. -
tvamos
nagyúr
1. Ide más is jár, szintén segítségért, észleletem szerint jobbára amatőrök és nem tudom miért volna jó, ha a hibás fogalmakat ismernék, tanulnák meg az itt előfordulók. Én legalábbis ezért korrigálok, ha teszem.
Ezert irtam le, hogyan mukodnek a villamos gepek. Oda tettem linket is, ahol rajtam kivul mas is leirja, mi is az indukalt feszultseg, hogyan keletkezik, es mi a hatasa.
Nincs jo, es rossz indukcio, csak egy van. A valtozo magneses ter feszultseget indukal. A valtozo magneses ter meg ugy johet letre, hogy vagy elmozdul a tekercs a mezoben, (mozgasi indukcio,) vagy az aram valtozik a tekercsben, (ez az onindukcio,) es mind a ketto van a motorban is, meg a generatorban is.
(#4662) aryes válasza robohw (#4661) üzenetére
Végre, két nap után választ kaptam az egyik kérdésemre
No, ennek orulok!
Ha megnezed ezen a linken a helyettesito kepet, akkor mar csak a Kirchoff torvenyeket kell ismerni ahoz, hogy megertsd, miert fog "holtpont" lenni: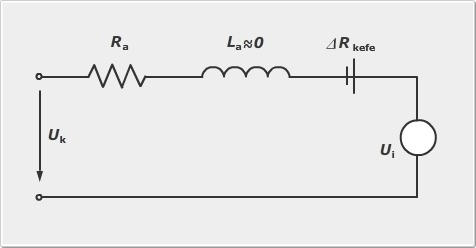
Az Ui indukalt feszultseg jelen esetben a fordulatszammal aranyos. (Nagyjabol.) -
-
tvamos
nagyúr
Mindenesetre, részemről a vitával felhagyok
Én eddig sem vitatkoztam veled.Sajnos számomra nem derül ki, hogy milyen feszültség indukálódna, hol történne ez és főleg: miért volna szükség erre a motor működéséhez?
Ez azért baj, mert az idezetedben is ott van: Mozgási indukció. Meg Lenz törvény...
Sajnálom én is, hogy nem tudom jobban elmagyarázni. Villamos hajtást könnyebben tudok csinálni, mint magyarázni.
(Tanári diplomám nincs ,csak villamosmérnöki.)Jut eszembe. H-bridge-en mindig van hova follyon az áram, nem gond az önindukció. Amúgy sem, mert nem felejtjük el a freewheeling diódát. szóval az önindukciót is szeretjük. Villamos veszteséget csak az ohmos ellenállás, meg a vasmag örvényáramú (eddy current) vesztesége okoz. (Persze, van még egy-két apróság, ami most nem jut az eszembe...)
Ui: ha jól emlékszem, a kedve veszteség is ohmos.
Meg vannak még morrhår veszteségek persze.Pl. Ebben a jegyzékben leírják, mi van. Az első 20 oldal a dc motor.
-
tvamos
nagyúr
Ez nem igy mukodik.
Amig all a motor, csak a motor vesztesegei vannak az aramkorben, (zarlati impedancia,) tehat az aram nagy. Nyomateka van a motornak, de leadott teljesitmenye nincs. A fordulatszam, es az indukalt feszultseg nulla.
Amikor elindul, no a fordulatszam, es az indukalt feszultseg is. Ilyenkor mar a vesztesegen eso feszultseggel "sorosan kapcsolodik" az indukalt feszultseg, (persze ez csak bizonyos elhanyagolasokkal igaz, pl. a magesezesi veszteseget itt elhanyagoltam,) es csokken az aram, (csokken a nyomatek is,) es felporog a motor.
Ennyi azt hiszem eleg egy arduino topicban.(#4642) robohw válasza aryes (#4641) üzenetére
A veszteseg nelkul a dc motor vegtelen nagy aramot venne fel indulaskor. (Amit persze lehetne csokkenteni ugy, hogy vesztesegeket kotunk a korbe...
(#4642) robohw válasza aryes (#4641) üzenetére
Visszaterve a te problemadra, az egy eleg bonyolult ugy, mert kell egy bizonyos feszultseg, hogy elinduljon a motor, es utana sem tudod 0 fordulatrol szabalyozni, hanem lesz egy minimum fordulat, amin stabilan elindul.#
Olyan dolog ez, mint a csuszasi, meg a tapadasi surlodas, ahol a tapadasi nagyobb, mint a csuszasi, szoval ha legyozod a tapadasit, utana sokkal kisebb lesz az ellenallas, es felporog a motor. Ez vonatkozik a csapagyakra is, (fokent, hogy ezekben a kis motorokban egyik, vagy mindket vegen a tengelynek csuszo csapagy van,) es a kefere is. Az is rontja a helyzetet, hogy ahogy kiserletezel, felmelegszik a motorban, es a hajtomuben a zsir, jobban ken, a motor konnyebben forog. Ha lehulik, megint nehezebben indul.
Van egy villamos (vagy inkabb elektro-mechanikus) probelma is, mivel korbefordulas alatt hullamzik a nyomatek. Minel kevesebb a kommutator szeletek szama, annal jobban, es persze annal instabilabb a rendszer.
Ezek a sarga hajtomuves mis kinai motorok nem valami jok, ha finoman akarod szabalyozni oket. -
tvamos
nagyúr
-
tvamos
nagyúr
Azért pár ellenállás bekötéséhez, meg a feszültség osztó képlet használatához nem kell sok tapasztalat. Vagy nincs hangkártyád?
Szerintem szkóp nélkül nem lehet eredményesen dolgozni ilyen projekteken.
Most nem találom a projektet, de mintha láttam volna olyan pc szkóp progit, ami a soros porton kapkodja el a jelet, talán pont egy arduino volt az adc hozzá... -
tvamos
nagyúr
Valtakozo feszultseg. (A valtoaram a vasutnal a valtot mukodteti.)
A multimeter integral, nem jo neked erre. Oszcilloszkop kell. Van egy csomo leiras, hogy kell csinalni PC hangkartya oszcilloszkopot, az pont eleg lenne neked ide. Szerintem... A dc reszet meg megmered multimeterrel. -
-
tvamos
nagyúr
válasz
 fpeter84
#4582
üzenetére
fpeter84
#4582
üzenetére
Es ez az ajanlott? En meg nem lattam tonkrement motorvezerlo csipet. Mondjuk ilyen L9110-esem nincs is. (Es ezek utan nem is lesz.)
(#4581) aryes válasza tvamos (#4580) üzenetére
En ugy szoktam vezerlot valasztani, hogy megnezem a motor rovidzarasi aramat (stall current) az adatlapban, (vagy megmerem,) es olyan vezerlot valasztok, ami kibirja azt. Most ilyen 2-5 USD koltsegekrol van szo, szerintem felesleges napokat tokolni azzal, hogy PWM frekiket kalibralok, meg szerencsetlenkedem, hogy nem megy rendesen. -
tvamos
nagyúr
Nem tudom. Ezt a kontrollert együtt adták a motorral? Mert nekem is van ilyen motorom, de ha jól emlékszem, nekem megy gond nélkül, 4kHz-en. Én vagy DRV8801, vagy valami nagyobb áramú kontrollert használtam hozzá. Bár gondolom vannak különböző változatai ennek a sárga motornak is.
-
tvamos
nagyúr
No, ez tok jo! Gratulalok!
Az autos projektet meg ne add fel, inkabb irj rola, mi a projekt, hatha van alternativ megoldas.
Nekem akkor volt a legjobb az egyenes tartas a vonalkoveto robotomnal, ha a caster ball hatul volt, es annak a tetejere tettem az akkupakkot. Amugy az en esetemben meg az is rontotta az oszkepet, hogy ket caster ballt hasznaltam, es azok is folyton megszorultak a kosztol, amit osszeszedett, ugyhogy en meg caster wheelre akartam pont atterni. (Csak abbol kell valami franko.)
Ez mondjuk sokkal gyorsabb, mint egy robotporszivo.
-
tvamos
nagyúr
Keresd ugy, hogy Tamiya Track and Wheel set.
De ne hidd, hogy ez a megoldas. A lanctalpas szeret egyenesen menni, csak nem szeret kanyarodni. Nem szeret gyorsan menni sem. Szeret elkuszni.
Szerintem azt a jo, ha kompenzalod a slip-et valamilyen megoldassal. Pl. giroszkop jo lehetne, de(!) a giro-nak is van slip-je, amit meg gyorsulasmerovel szoktak kompenzalni, ami eleg bonyolult, szoval, hobbistaknak a legegyszerubb a compass.
Nehez ez, mert rafut a kerek egy kis porra, es olyan szinten valtoznak meg a parameterek, hogy nincs az a pid, ami kikompenzalja a kerekek kozotti tapadas kulonbseget. Az egyik kerek forog, a masik mar regen all. Persze, ez a szepsege az egesznek! -
tvamos
nagyúr
válasz
 Gergosz2
#4571
üzenetére
Gergosz2
#4571
üzenetére
Tudom en is, de egy ekkora robotnal sokkal tobb mulik a tapadason, mint a tobbi parameteren.
(#4570) Janos250 válasza aryes (#4567) üzenetére
Nem nagy dolog valoban, csak sajnos az ilyen robotoknal mar a felnyitott kor parametereinek a megmerese sem egyszeru. Talajviszonyoktol, meg a kerek allapotatol, a homerseklettol, a paratartalomtol, meg az elem toltottsegetol is fugg, sot, ezek a kis motorok meg az elmeletileg azonos feltetelek mellett is meg tudnak viccelni, meg akkor is, ha nem valtozik az alkatresz.
(A sorozatgyartasrol nem is beszelve, de szerencsere arrol itt nincs szo.) -
#4568
tvamos
nagyúr
DrojDtroll
#4566
tvamos
nagyúr
válasz
DrojDtroll
#4566
üzenetére
Lentebb már írtam, Nikon 1 J5. De Sony compact is van ugyan ilyen gyors.
-
tvamos
nagyúr
Akkor még az a baj, hogy a dc motornak is ingadozik a nyomatéka, akár egy körülfordulás alatt is. Van olyan videóm is, amin a levegőben van a robot.
Én próbáltam fékkel, fék nélkül... PID-del persze jobb, de a compass volt a megoldás a gondnoka nekem.(Van egy Nikon 1-em, adott, hogy levideózok mindent.)
(#4557) Teasüti válasza aryes (#4551) üzenetére
Mindnek megcsúszhat a kereke, és ami megcsúszhat, az meg is csúszik. Annak is, ami lassan megy. -
tvamos
nagyúr
A saját robotomról készítettem pár nagysebességű videó felvételt, (1200fps,) és azokon látszik, hogy még ugyan azon a talajon sem egyformán csúszik meg mindig a kerék. Ennek megfelelően, ha nagyon könnyű a robot, még el is kanyarodik.
Én nem találtam egyszerű megoldást. (És bonyolultat sem.)
Mindenesetre, úgy tűnik nekem, hogy a gyorsulás, giroszkóp, mágneses szenzor beválhat...(Nem találtam meg egy felvételt sem sajnos, kb. 1-1.5 éve készülék.)
Amúgy ebbe a problémába bele futottak már mások is, majd felkutatom az emlékeim, milyen kulcsszóra hallgat a google.
Így nézted már?
-
tvamos
nagyúr
válasz
Teasüti
#4546
üzenetére
Nem rossz a kondis megoldás, csak figyelni kell a méretezésnél. Most nincs előttem a szabvány, de legyen mondjuk az egyenértékű kapacitás 20 pF, a vezetett discharge meg mondjuk 5kV. Neked akkora kondi kell, hogy a töltéskiegyenlítődés után se legyen több a feszültség 5-5.5V-nál...
Zener, schottky, egyre megy, ugyanúgy jó, elvileg. Az tuti, hogy a schottky gyors, kicsi a szivárgó árama, és a maradékfeszültsége. -
tvamos
nagyúr
válasz
Teasüti
#4537
üzenetére
Azok nem olyan diódák, mint amit a tápfeszültség stabilizálására használnak. (Én így tudom.) Az olcsó zenereknek eleg aok tud lenni a szivárgó árama, es nagy a differenciálás ellenállása, ezért nem szeretem.
Azért szoktam Schottky-t használni, mert gyors, és kicsi a nyitófeszültsége. Ahol én használom, ott nem a HBM szerinti ESD-t kell megetetni vele, inkább egyéb túlfeszültségeket. Pl. induktív terhelés kapcsolása okozta impulzusok. Van mindig korlátozó ellenállás is. -
-
tvamos
nagyúr
válasz
Teasüti
#4532
üzenetére
Ez valoszinuleg nem sugarzott zaj lehet, hanem vezetett zaj, az alufoliaba vurkolas szerintem nem hasznal, le is veheted rola.
Ha valami induktiv fogyaszton szakitod meg az aramot, es az "csap vissza", akkor ott nem eleg a 220 Ohm. Valami nagyobb kene a bemenetekre. Sot, az is lehet, hogy valamelyik kimeneti labon ter vissza az feszultsegcsucs. Ha az I/O labon levo diodakon folyik el aram, akkor azoktol meghulyulhet.
+ javaslom a reset labat 1k-n keresztul felhuzni a tapra, mert ott is van kondi, ami tultoltodhet, attol is meghulyulhet. -
#4529
tvamos
nagyúr
DrojDtroll
#4525
tvamos
nagyúr
válasz
DrojDtroll
#4525
üzenetére
Az nem tesz jót neki. Ha lassan tolod egyik végállásból a másikba, akkor nem ugrál a pillanatérték?
Én ilyet akarok használni, hasonló feladatra


 Akkor csinald csak.
Akkor csinald csak.




![;]](http://cdn.rios.hu/dl/s/v1.gif)














 Akkor jól van.
Akkor jól van.

Új hozzászólás Aktív témák
- Lenovo 16 Legion Slim5 WQXGA 165Hz G-Sync Ryzen7 7840HS 16GB 1TB Nvidia RTX 4070 8GB 140W Garancia
- ÁRGARANCIA!Épített KomPhone i5 14400F 32/64GB RAM RTX 5060 Ti 8GB GAMER PC termékbeszámítással
- BESZÁMÍTÁS! ASRock B450 R5 5500 16GB DDR4 250GB SSD 1TB HDD GTX 1050Ti 4GB GameMax STORM ADATA 600W
- ÁRGARANCIA! Épített KomPhone i5 12400F 16/32/64GB RAM RTX 5050 8GB GAMER PC termékbeszámítással
- 32 GB-os DDR5 laptop RAM garanciával
Állásajánlatok

Cég: Laptopműhely Bt.
Város: Budapest

Cég: NetGo.hu Kft.
Város: Gödöllő