Hirdetés
- Brogyi: CTEK akkumulátor töltő és másolatai
- GoodSpeed: Alza+ Megéri?
- Luck Dragon: Asszociációs játék. :)
- Meggyi001: A kérdés...
- gerner1
- Magga: PLEX: multimédia az egész lakásban
- GoodSpeed: 3I/Atlas: Üstökös vagy idegen civilizáció űrhajója?
- D1Rect: Nagy "hülyétkapokazapróktól" topik
- sziku69: Fűzzük össze a szavakat :)
- GoodSpeed: Nem vénnek való vidék - Berettyóújfalu
-

LOGOUT
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-

zsolti_20
senior tag
A soros kapcsolat letrejotte utan egy loopba fut bele ahol egy excel cella erteket valtoztatja 1-2 kozott. Rgyenlpre egy 1.5mp-s sleepet hasznalok excel vba scriptben. Igy vegre tudja hajtani a led fel es le kapcsolasat. Debha kisebb ertekre veszem mondjuk 0.5-re akkor mar csak kuldozgeti az ertekeket de nincs ideje vegre hajtani. Arduino uno boardot hasznalok az rx visszajelzo lednel latszik higy az adatot egybol fogadja de a parqncs vegrehajtasara mar nem marad ideje.
Arduino oldalon egy sima led villogtato kodot hasznalok ahol serial monitorba keri az utasitast. 1 vagy 2.
A loopban csak a kuldes resz kerult nem epiti fel ujra a kapcsolatot. A bitratat 9600-tol emeltem 2 millioig de ugyan az volt a gond mindig. A sebessegen nem valtoztatott. -
zsolti_20
senior tag
Üdv emberek!
aryes: emlékszem volt itt szó régebben az arduino gyorsításáról az órajel módosításának segítségével. Véleményed szerint segíthet megoldani a lassúság problémáját?
Sikerült megoldani az excel VBA és az arduino közti kommunikációt, tisztán látszik, mikor adatot küldök az arduinora akkor az boardon lévő led egyből felvillan az Rx-nél. De kell neki kb 0.8-1.2mp amíg felvillan a led ami csatlakoztatva van a D13-GND-re. Lehetséges gyorsítani az utasítás végrehajtásán? Vagy magával a kóddal lenne a gond? Van itthon egy ESP8266, lehet inkább arra kellene építenem ha gyorsaságot várok el?
Igazából a lényeg az, hogy szkennelek egy bárkódot, annak be kell érkeznie PC-re, lekéri a bárkód infót egy applikáción keresztül, az infó bekerül az excel A1 cellájába, majd továbbítja az arduionak és így végre hajtja az adott utasítást. Az egésznek a gyenge pont az arduino folyamat végrehajtási sebessége. A többi az villámgyorsan dolgozik. -

Imy
veterán
Köszi, kipróbáltam. A fordító hibaüzenetet dob, és a bekötés honnan derül ki?
Ez a jelenlegi program, de lehet valamit rosszul csináltam:
#define ROTE_CLK GPIO_NUM_xx#define ROTE_DT GPIO_NUM_xx#define ROTE_SPCTM 50000 // speed control time limit, not defined no speedctrlvolatile int32_t rotval = 0;void IRAM_ATTR isrrot() {volatile static uint8_t pinsta = 0x3, cwi = 0, ccwi = 0;volatile static uint8_t cwexp[] = {0xD, 0x4, 0x2, 0xB};volatile static uint8_t ccwexp[] = {0xE, 0x8, 0x1, 0x7};int32_t rvchg;#ifdef ROTE_SPCTMvolatile static uint32_t tc = 0, tm = 0;uint32_t ctm, td;#endifpinsta = (pinsta << 2) & 0xf;if (digitalRead(ROTE_DT)) pinsta |= 0x2;if (digitalRead(ROTE_CLK)) pinsta |= 0x1;if (pinsta == cwexp[cwi]) cwi++;else if (pinsta == ccwexp[ccwi]) ccwi++;if (cwi == 0x4 || ccwi == 0x4){if (cwi == 4) rvchg = 1;else rvchg = -1;pinsta = 0x3; cwi = 0; ccwi = 0;#ifdef ROTE_SPCTMctm = micros();td = ctm - tm;tm = ctm;if (td < ROTE_SPCTM / 2) rvchg *= 7;else if (td < (ROTE_SPCTM * 2) / 3) rvchg *= 4;else if (td < ROTE_SPCTM) rvchg *= 2;#endifrotval += rvchg;}} // isrrotint16_t getrotv() {static int32_t lval = 0;int32_t cval = rotval;int16_t rotc = 0;if (lval != cval) {rotc = cval - lval;lval = cval;}return (rotc);} // getrotvvoid inirotein(gpio_num_t clk, gpio_num_t dt) {pinMode(clk, INPUT);pinMode(dt, INPUT);attachInterrupt(digitalPinToInterrupt(clk), isrrot, CHANGE);attachInterrupt(digitalPinToInterrupt(dt), isrrot, CHANGE);} // iniroteinvoid setup() {inirotein(ROTE_CLK, ROTE_DT);}void loop() {Serial.print("Encoder_positionp = "); Serial.println(rotval);}Fordító hibaüzenete:

-

M@nH.
aktív tag
Utána néztem, kicsit trükkös a dolog (az adat max nagysága miatt binárisan), de nem lehetetlen. Köszi

Egy másik dolog. Arra van mód, hogy egy "unsigned int" változót ethernet segítségével weblapon keresztül változtassunk? Pl. egy szövegdobozba bevitt értéket gombnyomásra beíratok? -
Imy
veterán
Beleraktam a programba, de jelen esetben is össze vissza ugrál. Ha csak az encoder van benne, a hőmérséklet mérés ls kiírás nem, akkor jó. Okés, hogy a sok serial print, de az interuptnak nem kellene azt kiküszöbölnie?
#include <Adafruit_MAX31865.h>// Use software SPI: CS, DI, DO, CLKAdafruit_MAX31865 thermo = Adafruit_MAX31865(5, 6, 7, 8);// use hardware SPI, just pass in the CS pin//Adafruit_MAX31865 thermo = Adafruit_MAX31865(10);// Rotary Encoder Module connectionsconst int PinSW=3; // Rotary Encoder Switchconst int PinDT=4; // DATA signalconst int PinCLK=2; // CLOCK signal// The value of the Rref resistor. Use 430.0 for PT100 and 4300.0 for PT1000#define RREF 430.0// The 'nominal' 0-degrees-C resistance of the sensor// 100.0 for PT100, 1000.0 for PT1000#define RNOMINAL 100.0//Resistance meterfloat Ra = 0.00385;float R0 = 20.9;float Rt;float T;///////ENCODER//////////////////////////// Variables to debounce Rotary Encoderlong TimeOfLastDebounce = 0;int DelayofDebounce = 0.01;// Store previous Pins stateint PreviousCLK;int PreviousDATA;int displaycounter=0; // Store current counter value/////////////////////////////// TEMPERATURE_SET///////////////////////////////////////////int Temp_set_pos;int Temp_set_last;int Temp_up;void setup() {Serial.begin(115200);Serial.println("Adafruit MAX31865 PT100 Sensor Test!");thermo.begin(MAX31865_2WIRE); // set to 2WIRE or 4WIRE as necessarypinMode(PinCLK,INPUT_PULLUP);pinMode(PinDT,INPUT_PULLUP);pinMode(PinSW,INPUT_PULLUP);// Put current pins state in variablesPreviousCLK=digitalRead(PinCLK);PreviousDATA=digitalRead(PinDT);// Set the Switch pin to use Arduino PULLUP resistorspinMode(PinSW, INPUT_PULLUP);}void loop() {///////////MAX31865////////////////////////////////////////////////////////////////////////////uint16_t rtd = thermo.readRTD();//Serial.print("RTD value: "); Serial.println(rtd);float ratio = rtd;ratio /= 32768;Rt = RREF * ratio;T = ((Rt - R0) / (R0 * Ra));//Serial.print("Ratio = "); Serial.println(ratio,8);Serial.print("Resistance = "); Serial.print(RREF * ratio, 2); Serial.println(" ohm");//Serial.print("Temperature = "); Serial.println(thermo.temperature(RNOMINAL, RREF));Serial.print("PakaTemp = "); Serial.print(T, 2); Serial.println(" C");// Check and print any faultsuint8_t fault = thermo.readFault();if (fault) {Serial.print("Fault 0x"); Serial.println(fault, HEX);if (fault & MAX31865_FAULT_HIGHTHRESH) {Serial.println("RTD High Threshold");}if (fault & MAX31865_FAULT_LOWTHRESH) {Serial.println("RTD Low Threshold");}if (fault & MAX31865_FAULT_REFINLOW) {Serial.println("REFIN- > 0.85 x Bias");}if (fault & MAX31865_FAULT_REFINHIGH) {Serial.println("REFIN- < 0.85 x Bias - FORCE- open");}if (fault & MAX31865_FAULT_RTDINLOW) {Serial.println("RTDIN- < 0.85 x Bias - FORCE- open");}if (fault & MAX31865_FAULT_OVUV) {Serial.println("Under/Over voltage");}thermo.clearFault();}Serial.println();//delay(500);// If enough time has passed check the rotary encoderif ((millis() - TimeOfLastDebounce) > DelayofDebounce) {check_rotary(); // Rotary Encoder check routine belowPreviousCLK=digitalRead(PinCLK);PreviousDATA=digitalRead(PinDT);TimeOfLastDebounce=millis(); // Set variable to current millis() timer}// Check if Rotary Encoder switch was pressedif (digitalRead(PinSW) == LOW) {displaycounter=0; // Reset counter to zeroSerial.print("Counter = "); Serial.println(displaycounter);}}// Check if Rotary Encoder was movedvoid check_rotary() {if ((PreviousCLK == 0) && (PreviousDATA == 1)) {if ((digitalRead(PinCLK) == 1) && (digitalRead(PinDT) == 0)) {displaycounter++;Serial.print("Counter = "); Serial.println(displaycounter);}if ((digitalRead(PinCLK) == 1) && (digitalRead(PinDT) == 1)) {displaycounter--;Serial.print("Counter = "); Serial.println(displaycounter);}}if ((PreviousCLK == 1) && (PreviousDATA == 0)) {if ((digitalRead(PinCLK) == 0) && (digitalRead(PinDT) == 1)) {displaycounter++;Serial.print("Counter = "); Serial.println(displaycounter);}if ((digitalRead(PinCLK) == 0) && (digitalRead(PinDT) == 0)) {displaycounter--;Serial.print("Counter = "); Serial.println(displaycounter);}}if ((PreviousCLK == 1) && (PreviousDATA == 1)) {if ((digitalRead(PinCLK) == 0) && (digitalRead(PinDT) == 1)) {displaycounter++;Serial.print("Counter = "); Serial.println(displaycounter);}if ((digitalRead(PinCLK) == 0) && (digitalRead(PinDT) == 0)) {displaycounter--;Serial.print("Counter = "); Serial.println(displaycounter);}}if ((PreviousCLK == 0) && (PreviousDATA == 0)) {if ((digitalRead(PinCLK) == 1) && (digitalRead(PinDT) == 0)) {displaycounter++;Serial.print("Counter = "); Serial.println(displaycounter);}if ((digitalRead(PinCLK) == 1) && (digitalRead(PinDT) == 1)) {displaycounter--;Serial.print("Counter = "); Serial.println(displaycounter);}}Serial.print("Counter = "); Serial.println(displaycounter);} -
zsolti_20
senior tag
Össze állt a kép végre a fejemben, hogy mi ez a kommunikáció egész pontosan. A segítségeddel sikerült elindulni.

Látom hogy a serial monitoron megjelenik a szkennelt dolog de csak ??????-et látok, gondolom a baudrate miatt. Egyenlőre minden raten ugyan úgy csak kérdőjelek látok, de az biztos hogy az információt az arduinó megkapja. Igazad volt hogy a jumperes részhez kell forrasztani. Csak logika az egész...
Ha sikerül megoldani a ?????-es problémát akkor van még egy dolog amiben nem vagyok biztos hogy lehet megcsinálni.Folyamatos automata szkennelésre lenne szükségem. De a modul csak akkor szkennel ha megnyomom rajta a gombot. A kérdésem az, hogy ez szoftveresen megoldható? Vagy a gombnyomást szimuláljam inkább arduioval?

Szerk.: 9600baudrateval hibátlanul megy. -
zsolti_20
senior tag
Csupán azt néztem meg, hogy mi hová megy egész pontosan. Próbáltam több módszert is most ott tartok hogy a scanner 3,4 CH340 lábát kötöttem az arduino UNO RX,TX lábára. Kaptak közös GND-t. De valamiért serial monitorban nem látok semmit sem. Egyébként van erre valahol egy egyszerű példakód?
Az igazat megmondva még soha nem foglalkoztam UART-al. Minden kezdet nehéz számomra de bele szoktam jönni miután megértem a működését. -
zsolti_20
senior tag
Kicsit rámértem hogy mi hol van egész pontosan és most jól össze zavarodtam bekötés terén. Bedobok ide egy képet, mi hová vezet, mert nem vagyok biztos benne hogy az arduinonak az s-tx/s-rx-hez kell csatlakonia.
kép:
[link]
Ezeket úgy mértem ki hogy a jumper le volt húzva. -

Dißnäëß
nagyúr

Az ott balra egy piros LED gyűrűvel ellátott pushbutton. A készülék főkapcsolója a fenekén van. Táp bedug, főkapcsoló bekapcsolásra még a kütyü nagy trafója nem indul, egy külön nyáktrafó viszont áram alá kerül, ami fesszabályzott egyenirányítással ad stabil 5V-ot egy Leonardo-nak. Az meg fade-elgeti a LED-et félhalványan ki-be szép lassan. Amint a gombot megnyomom egyszer, ugyanúgy, mint bármilyen gyári eszköz, indul a mandula. Az Arduino egy 5A/250VAC relével zárja a nagy trafó primer körét, éled az összes szekunder (fűtések + anódfeszek) és indul az erősítő. (A relé tekercs áramfelvétele pont az Arduino limitjén belül van). LED gyűrű meg folyamatosan világítóra vált. Amint megint megnyomom a gombot, relé elenged (normally open), a nagy trafó primer köre megszakad és a készülék nagyja kikapcsol, LED megint fade-elget. Kb ennyi egyelőre. Implementáltam még a kódba a fade mellé a debounce-ot is az example-ök közül, ami a nyomógomb zajt semlegesíti, tehát még véletlen sem, illetve akarva sem tudom megcsinálni azt, hogy egymásután többször gyorsan megnyomva a gombot a relé elkezd mint az állat ki-be kapcsolni. Ez küzdős volt, a fade loop-al jól összehozni, de valahogy kiokoskodtam és tökéletes most.Van egy másik Arduino-m, egy Raspberry Pi Meet Aurdino-m (ami szintillesztésre is kiváló Pi és Arduino feszek között), de ezt magában, Pi nélkül fogom szerintem a következő projektbe betenni és jópár dolgot figyeltetni vele az erősítő működésében. (Az nagy erősítő lesz, nem fejhallgató erősítő, mint ez).
Ha meg elég merész lennék, a wifis ESP32-t befognám és írnék hozzá egy appot, de bilibe lóg a kezem, azt majd később

-

Janos250
őstag
Ha Pi-t akarna használni, akkor valóban új dolgokat kellene megtanulnia, de az ESP32 pont ugyanúgy programozható, ugyanaz a program fut rajta, mint az UNO-n, nanon, vagy a többieken.
A interruptos példaprogramok is. Pl. azattachInterruptis.attachInterrupt(GPIOPin, ISR, Mode)Ugyanazok a paraméterek, ugyanaz a sorrend. Az, hogy van még benne lehetőség, azt nem feltétlen kell kihasználni. Például, hogy az ISR --t betehetjük a gyors memóriába (IRAM_ATTR), ezek csak pluszok, ami az UNOban nincs, ezeket nem feltétlen kell használni, mehet rajta az UNO program, sokkal gyorsabban.
Nem hiszem, hogy pl. a párhuzamos programozás akkora nehézség lenne. Igaz, a következő példában cout van, nem Serial.print, de természetesen a Serial.print is ugyanúgy használható.
http://arduinouser.hu/esp32/AszalakEsAzESP32.pdf -

kesztió
aktív tag
Mondjuk, a szalagkábel pont olyan eszközben lesz, amit ideális esetben egyszer szerelünk és többet el sem mozdítjuk (falba süllyesztett okos termosztát), de ettől még nekem nagyon sérülékenynek tűnik, ha a kábelt sokat mozgatjuk, az előbb vagy utóbb kiszakad a forrasztás helyén. Eltérően a fotón látható jumpertől, amelynél sokkal kisebb mozgási lehetőséget ad a kábelnek. De ha azt mondod, nem fogok hülyeségekkel kínlódni és közvetlenül fogom forrasztani a kábelt.
Ha már itt tartunk, van valami célszerszám a szalagkábel szigetelésének eltávolítására? Vagy egyenként kell lekínlódni őket a végekről forrasztás előtt? Esetleg árulják a kábelt előre pucolva forrasztáshoz? -
Janos250
őstag
Srácok!
Érdemes gyalog megcsinálni a vonalkód olvasást, amikor 10-20 dollárért
kész Uart/USB/WiFi csatlakozású vonalkód olvasót lehet kapni?
Ami mellékesen többnyire még QR kódot is tud olvasni, ha esetleg a későbbiekben arra is szükség lesz. Van kézi, és beépíthető egyaránt.
Webáruházakban "barcode scanner"
Például:
link
link -
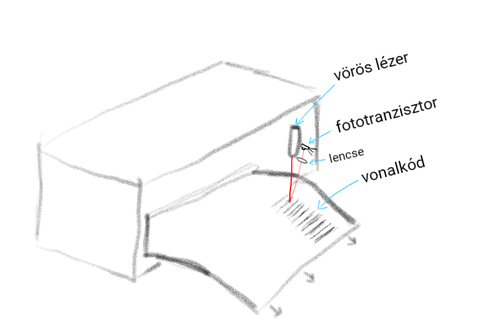
Remélem látszik a lényeg a képen.
Olyan optokapu kellene, ami nem infra fényt használ, hanem látható fényt, vagy egy egyszerű vörös lézerdióda + fototranzisztor, mert a fekete nyomtatófesték sajnos az infravörös fényt nem igazán nyeli el, nem lesz elég kontraszt a két jelszint megkülönböztetéséhez.
Rajzoltam egy lencsét a fény fókuszálásához, hogy a vékony vonalakat be lehessen olvasni, de ez egy lézerdiódánál talán el is hagyható. -
atesss
addikt
"Azért ettől még nem raknám be a main-be."
Mármint ezt magára a port-lekérdezésre és a feldolgozásra értettem.
Az "órás mérés" az, amit viszont beraknék a main-be.Közben viszont kiderült, hogy az event detection függvény:
- Tud olyan kapcsolót is, hogy ... , bouncetime=xxx [msec]
Ez így kb. azt valósítja meg készen, amit te írtál első opciónak. Amint van egy interrupt, onnantól vársz 80ms-ot (ilyenkorra ugye már biztosan nem lesz 0-sban az INT pin, mivel pont ez a cél vele).
Szóval ez most nekem nem túl jó megoldás.
- Alapból Threading-ként, többszálúan működik [link] (Install RPi.GPIO version 0.5.2a for multiple threaded callback interrupts)
És nem találtam rá opciót, hogy kikapcsolható lenne a Threading (egy ezt még nem tudó régi verziót - csak ezért - meg nem akarnék felrakni)."Ezért is nem érdemes az interruptot letiltani."
Pedig ezzel próbálkoztam most. Első körben csak hogy csak egy gombra megoldjam a pergésmentesítést kb. valahogyan.
De hát nem akar így sehogy se menni, szóval megyek tovább úgy, hogy nem tiltom le az interruptot. -

gyapo11
őstag
Sokszor jó a sw megoldás, az én teszt óraprogramomat is egy sima kontaktussal vezéreltem, 50 ms körüli időt vártam, és tévesztés nélkül működött jól. De koszosabb vagy oxidos, szulfidos stb. érintkezőkkel, lassúbb nyomással, remegő kézzel adódhatnak problémák, vagy már olyan hosszúra kell nyújtani a várakozást, ami gondot okoz. Az én tesztem mikrokapcsolóval az volt, hogy a legrövidebb pöccintés is 50 ms körüli időre zárta az áramkört. Ez nyilván kapcsolótól és kéztől függ. De így 150 ms-on belül simán be tudok vinni két pöccintést, viszont ha 100 ms-ot vár a program, akkor már nem. Hw megoldással pedig bármennyit, ott az emberi képesség a határ. Pl. zongora billentyűket 4 ujjal simán lehet gyorsabban nyomogatni. 4 billentyűt egymás után. De akár egy db mikrokapcsoló is képes gyorsabb működésre, ha nem ember nyomogatja, hanem szalagon haladó dobozok vagy ilyesmi.
-
atesss
addikt
"de ha kiveszed a feldolgozást az interruptból és a main-be teszed"
Azért ettől még nem raknám be a main-be. Az Interrupt megtörténte átállítana egy Flag-ként használt változót. És akkor innentől indulna el az időmérés a main függvényben (innentől minden ciklusban lefutna a mainben az, ami ellenőrizné mennyi idő telt el).
Amint az eltelt idő több mint 50ms, akkor indítanám a "tényleges interrupt-handler" , azaz a PCF8574-et kiolvasó, és utána az ezt a kiolvasott értéket meg feldolgozó függvényeket.
"Ennek a módszernek a hátulütője, hogy minimum 50ms-al lassítja a program reagálását."
Ez sajnos így van, ez speciel tényleg nem tetszik ebben a megoldásban.
"Ha fontos az azonnali reagálás, pl vmi időzítő kapcsolódik a gombnyomáshoz, akkor az első interruptra indulhat a művelet, és utána kell figyelni, hogy a mondjuk 80ms-belül érzékelt újbóli gombnyomást figyelmen kívül kell hagyni."
Ez tényleg gyorsabb. Viszont itt már figyelni kell rá, hogy mi van ha pl. két gombot egyszerre nyomtál le.
Akkor ha tényleg eléggé egyszerre történt a megnyomás (80ms-on belül), akkor simán előfordulhat, hogy ugyan az első beolvasás időpontjában (1-2ms után) még csak az egyik gomb volt lenyomva. De viszont a 80ms vége után (amikortól megint újra figyelnénk a változásokat), viszont már mindkettő, és így már többé nincs változás --> nincs Interrupt.
Vagyis a második gomb lenyomása így akár el is veszhet. -
atesss
addikt
Igen, ez a hardveres pergésmentesítés tényleg probléma forrás.
Ezt milyen kapcsolással tudnám megoldani a lehető legegyszerűbben ?
Ugyanakkor ezt az elég fura, programkód-alapú hiba forrást (konkrétan én ezt valami bug-nak sejtem már) valószínűleg nem oldaná meg.
Miért lesz teljesen más az INT pin működése - a szkópon is láthatóan - , ha beteszek egy már kész (fixen feltöltött) változót kiprintelő függvényt ??
(Jó párszor lefuttattam direkt, szóval a pergés miatti különbséget ebből a szempontból kizárhatjuk.)
"És az INT láb értékét ne olvasd közben, mert ahogy írtam, python-ból ez is lassú, talán még lassabb, mint az i2c."
Na de ténylegesen ez a GPIO-olvasási művelet lassú (az adott programkód lefutása sok idő)? Vagy pedig amit már írtál egyszer korábban hogy bizonyos időn belül újra meghívva nem frissíti a korábban lekérdezett állapotot ?
Bár azt azért kipróbálnám, hogy mi van ha kiveszem, azif GPIO.input(I2C_IO_INTERRUPT_GPIO) == 0:
feltételvizsgálatot, és úgy olvasom be folyamatosan i2c-n a port állapotot. -
atesss
addikt
Na most próbálkoztam tovább még más sleep időtartamok megadásával.
Illetve a main függvénybe (ami másodpercenként kb. 70-80x lefut) is beraktam egy kiiratást.
Nekem úgy tűnik, hogy hiába adok meg kb. bármilyen időtartamot...Viszont a main függvényben lévő kiiratás meg már az első alkalommal is HIGH-nak írja az INT pint. Mindegy, hogy ez az előbbi sleep idő most éppen néhány msec volt, vagy 400msec...
Lehet hogy amint kilépek ebből a i2c_io_reader() függvényből, akkor frissülhet csak a GPIO pin állapota ?? -
atesss
addikt
Hát én erősen kétlem.
A PCF8574-hez ezt a python library-h használom: [link]
Most közben frissítettem a kódomat, és az INT pin-t most már nem pollinggal, hanem interrupttal kezelem le.
De a problémás résznél nem történt semmi változás.
Bemásolom akkor az összes releváns részét a kódomnak.
Bár ez már így kicsit OFF kezd lenni, mert az Arduino miatt általában C vagy C++-t szoktatok írni a topicba.import RPi.GPIO as GPIOI2C_IO_INTERRUPT_GPIO = 26 # Board (physical) Pin Number 37GPIO.setmode(GPIO.BCM)GPIO.setup(I2C_IO_INTERRUPT_GPIO, GPIO.IN)from pcf8574 import PCF8574I2C_PORT_NUM = 1I2C_IO_ADDRESS = 0x20i2c_io = PCF8574(I2C_PORT_NUM, I2C_IO_ADDRESS)def i2c_io_reader():io_interrupt_flag = GPIO.input(I2C_IO_INTERRUPT_GPIO)print("Interrupt pin állapota - olvasás előtt: ", io_interrupt_flag)i2c_io_readed_array = i2c_io.porttime.sleep(0.001)io_interrupt_flag = GPIO.input(I2C_IO_INTERRUPT_GPIO)print("Interrupt pin állapota - 0.001 sec-el olvasás után: ", io_interrupt_flag)return i2c_io_readed_arraydef i2c_io_interrupt_handler(channel):i2c_io_readed_array = i2c_io_reader()i2c_io_readed_array_reversed = i2c_io_reverser(i2c_io_readed_array)i2c_io_state = i2c_io_namer(i2c_io_readed_array_reversed)i2c_io_evaluator(i2c_io_readed_array_reversed, i2c_io_state)i2c_io_printer(i2c_io_readed_array_reversed, i2c_io_state)GPIO.add_event_detect(I2C_IO_INTERRUPT_GPIO, GPIO.FALLING, callback=i2c_io_interrupt_handler) -
atesss
addikt
A kódba beraktam debug-nak plusz lekérdezéseket, ami lekérdezi az INT lábat, és kiírja a terminalra.
Közvetlenül az I2C-s kiolvasó függvény elé is raktam be, illetve közvetlenül utána is.
Plusz kipróbáltam azt is, hogy az I2C-s kiolvasó függvény után beraktam még sleep()-et. Először egészen rövidet (0.0001 sec asszem), gondolva hogy oké, alapból akkor "túl gyors" a Raspberry, de ha berakom a sleep()-et, utána már tényleg újra HIGH-ban lesz.
Aztán utána, hogy láttam hogy még mindig LOW maradt, növeltem ezt a sleep()-et. Elmentem egészen 0.1 sec-ig, és még akkor is LOW maradt. -
atesss
addikt
Adatlap 11.oldala:
Resetting and reactivating the interrupt circuit is achieved when data on the port is changed to the original setting or data is read from, or written to, the port that generated the interrupt. Resetting occurs in the read mode at the acknowledge bit after the rising edge of the SCL signal, or in the write mode at the acknowledge bit after the high-to-low transition of the SCL signal.
...
This device does not have internal configuration or status registers. Instead, read or write to the device I/Os directly after sending the device address (see Figure 16 and Figure 17).
By sending an interrupt signal on this line, the remote I/O can inform the microcontroller if there is incoming data on its ports without having to communicate by way of the I 2C bus. Therefore, PCF8574 can remain a simple slave device.Úgy néz ki ez nem tud ilyet, nem tudom felülírni az INT regisztert, mert nincs olyan neki (vagy legalábbis ha van is valami belső, kívülről nem hozzáférhető).
-
atesss
addikt
Hát a kódom elég gyorsan fut (kb. pár msec lehet egy teljes ciklus), ennyi időnként pollingolja a Raspberry-nek azt a GPIO bemenetét, amire rákötöttem a PCF8574-nek az INT pinjét.
Amint azt érzékeli a fő programszám, hogy 0-ban van ez a GPIO, rögtön meg is hívja a PCF8574-et I2C-n kiolvasó függvényt. A PCF8574 pedig a kiolvasás után magától, rögtön (adatlap szerint, ha jól olvastam ki, 4usec-en belül) alaphelyzetbe (azaz 1-esbe) állítja az INT Pint.
Tehát elvileg pár msec időre kellene csak megváltoznia az INT pinnek. Amit pedig egy multiméter észre se venne.
Szerintem - maximális eltérésként, de ez tényleg csak egy pillanatra (a multiméter-kijelzőt szemmel olvasva) - az a -1,5V körüli érték azt jelenti, hogy ennél jóval több időre megváltozott.
Nem tudom pontosan mekkora egy mezei multiméter sebessége, milyen ADC van benne, de kb. pár tized sec lehet a mérési illetve átlagolási ideje. A -1,5V kb. azt jelenti, hogy a megváltozott érték időtartama nem éri el az átlagolási időt, de közelít hozzá (nagyon durva becsléssel fele körül van).
De hát sokkal pontosabb lenne ezt szkóppal kimérni
Most már kíváncsi vagyok, asszem inkább várok, és nem is forrasztom be fixre a felhúzó ellenállásokat mielőtt letesztelném szkóppal.Nincs bekapcsolva a pulldown a raspberry-n.
-

And
veterán
A kötelező felhúzót a PCF8574-re írtam, az MCP-kben valóban van 100k-s belső kapcsolható ellenállás. A PCF INT-polaritásában igazad van, de ez eddig nem is tűnt fel
 . Az adatlapon első blikkre kicsit megtévesztő. Még jó, hogy az MCP-k esetén az INT-jel polaritása is megszabható, meg az is, hogy csak open-drain kimenet legyen, vagy push-pull.
. Az adatlapon első blikkre kicsit megtévesztő. Még jó, hogy az MCP-k esetén az INT-jel polaritása is megszabható, meg az is, hogy csak open-drain kimenet legyen, vagy push-pull. -
atesss
addikt
Pedig nagyon úgy néz ki hogy kell külső felhúzó ellenállás a PCF8574-nél.
Legalábbis az adatlap 15. oldalán a "Typical Application" ábrájára gondolom hogy nem véletlenül rakták fel.
De most megint átnézve az adatlapot, igazából olyan infót viszont nem találtam leírva, hogy "muszály" tenni.
Az MCP23017 az könnyen lehet hogy más, simán lehet hogy abba viszont már építettek be. (Ez akkor még egy - nem is kicsi - előnye lenne akkor annak az IC-nek, illetve a rá épülő moduloknak.)Na ezt elírtam. Javítva így néz ki:
Amikor változás van, rendben 0-ba vált az INT pin. Utána kiolvasom az összes bemenetet, rendben látszik is hogy a PCF8574-nek melyik bemeneti pinje változott meg.
De az INT 0-ban marad ez után is, nagyon sokáig.És a multiméteres mérést is pontatlanul írtam:
"Multiméteren is felugrik az érték az INT pin-t mérve (ha pár msec lenne, akkor ezt nem mutatná ki), de szkóppal sajnos most pont nem tudom megnézni pár napig."
Ebben az esetben az INT pin-t a VCC-hez (3,3V-hoz) képest mértem.
Vagyis alapból 0-t mutat a multiméter (1-esben, azaz 3,3V-on van az INT). És ha Interrupt van akkor pedig a felugró érték egy negatív lesz (nem megy el -3,3V-ig, de kb. olyan -1,5V-ig igen).
De a lényegen ez igazából nem változtat. Az a probléma, hogy olyan hosszú időre megváltozik az Interrupt pin, hogy ezt még egy mezei multiméter is simán kimutatja. -
gyapo11
őstag
Ha ntfs filerendszer van a wincsin, ajánlom vagy az Everythinget vagy az Ultrasearchöt. Az MFT-ben turkálnak, köröket vernek bármilyen más keresőre.
-

Tankblock
aktív tag
"100 k erase/write cycles" a pontos érték. A csatoplt forrásban a wear leveling algoritmus leírása is szerepel.
Forrás : [link]Egy ilyen szép uC elpazarolni.... Inkább ATtiny szériából akár fix külső kristállyal.... és RTC vel is. 8 láb - 2 Vcc, Gnd, 1 Gép érzékelés, 2 i2C RTC hez 1 Rst, 1 LED , 1 gombnak, vagy a resetet használni..... Mazoistáknak ATTiny13A Assemblyben
1K Bytes of In-System Self-programmable Flash program memory
– 64 Bytes EEPROM
– 64 Bytes Internal SRAM
– Write/Erase Cycles: 10,000 Flash/100,000 EEPROM
![;]](//cdn.rios.hu/dl/s/v1.gif)
-
Dißnäëß
nagyúr
Na jó, így már más a leányzó fekvése. Emberi léptékben gondolkodtam a "lassú" alatt. Egy ilyen alapvető funkcióhoz természetesen tökmindegy, hány ms alatt történik meg a varázslat, csak léptesse
Én akciósan vettem belőle négyet, harmadáron volt darabja. Kb egy hónapig tartott.. február környékén.
-
Dißnäëß
nagyúr
Mert azt írtad, lassú az eeprom írás.
Nincs valami olyasmi, mint egy USB pendrive, hogy kiteszi milliszekundumok alatt - de legyen lassú, akár 1mp is - és kész ?Nem vagyok nagy szaki, hogy külön wear levelinget írjak, törjem rajta az agyam, kezdő C++-os vagyok, nem egy sokéves tapasztalatos zseni. Szóval a kóddal lenne gondom, ha még wear levelinget is néznem kell.
Én közvetlen tőlük rendeltem, a DFRobot-ról. Nagyon jó kis kütyük, beváltak. [link] Egész jó tempóban küldték...
(Van Beetle ESP is)
-
gyapo11
őstag
Nem tudom mennyire tiszta az a környezet, ahova a szenzort kellene tenni, de általában probléma a kosz, ami a mechanikai és optikai egységeket működésképtelenné teszi. Ezért olyan kell, amit tökéletesen el lehet szigetelni, mégis képes érzékelni a külvilágot, ez pedig a mágnes. Az egész elektronikát betenném egy vízhatlan dobozba, és csak egy úszót hagynék kint egy mágnessel, bent meg a mágnes helyzetét olvasnám le egy hall cellával.
-

JozsBiker
aktív tag
Azt szeretném megoldani, hogy egy adott esővíz árok belsejébe legalulra tennék egy csövet 5-10 mm körüli belső átmérővel, és mikor azt ellepi a(z eső) víz, akkor kellene bekapcsolni egy kis szivattyút, ami azon a csövön keresztül szívná a vizet egy tartályba. Vagyis kb. 5-10 mm vízmagasságot kellene érzékelni. Viszont nagyon fontos lenne ugye, hogy ha visszacsökken a vízmagasság, akkor azt azonnal vegye észre és kapcsoljon ki. Vagyis nedvesség érzékelő nem hiszem hogy jó lenne, mert amíg meg nem szárad, addig levegőt szívna a szivattyú.
-
zsolti_20
senior tag
Igazan nincs mit, este jelentkezek a tesztek utan.
Toltesvezerlonek pedig a TP4056-ot hasznalom, de abbo lis azt a fajtat, ahol egyszerre lehet tolteni az aksit es hasznalni rola.
[link]
Persze rendelhetsz mas forrasokbol is mert ezeket csak az elso talalat szerint linkeltem ide. Mashol lehet olcsobb vagy tobbet kapsz ugyan ennyiert. -
zsolti_20
senior tag
Ha jol emlekszem igen, mert amikor kerestem a legjobb DC-DC konvertert az egyik elonye az volt hogy boven tud mukodni 2.8v alatti feszultsegnel is, igy ha nem jon be a 18650, konnyen ceruzaelemes verziova alakithato.
Gyakorlatban soha nem neztem, de ha haza erek letudom neked tesztelni meg 1.2v ujratoltheto ceruzelem meretu akkumulatorral is. -
-

repvez
addikt
Ahogy mondani szokták nem megy az olyan könnyen faluhelyen .
amugy azt gondolom, hogy valami fizikai limit van a mérési gyakoriságban vagy az arduino vagy a modul chip frekvenciája vagy valami más lehet a korlát és nem szoftveres.
max ugy lehet szoftveres ha a beérkező adatokat nem képes olyan gyorsan feldolgozni az arduino mint ahogy kapja.
De ennél többet egyenlöre nem tudok rola.
Hiába tervezném meg a rendszert mondjuk 1 fok szögeltéréssel 1ms os mérésgyakorisággal ha a modul nem képes fizikailag ezt teljesiteni. -
repvez
addikt
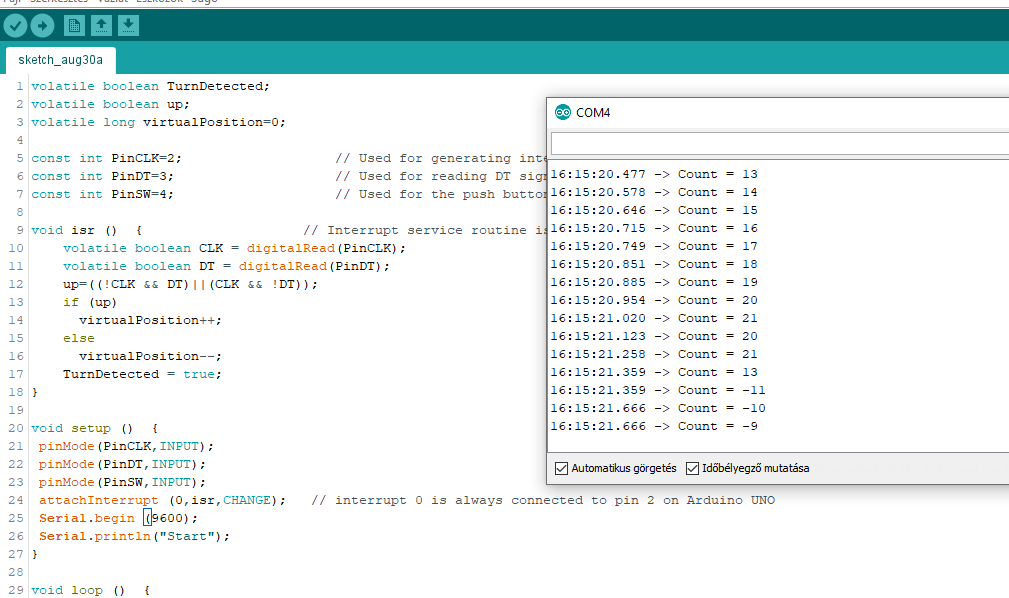
[link]
A video leirásában linkelve van minden hozzá, kód bekötés stb..A hasonloságot ugy értem, hogy nem csak a forgatást hanem a teljes kialakitás ugyan az minden alkalommal, nincs benne változatosság, hogy hátha már kialakitással esetleg egyszerübb lehetne vagy pontosabb.
-
Janos250
őstag
Még a legelején, egyből az első bekapcsolásnál kiégett a fűtőbetét, mert alacsony hőmérsékletet jelzett, és csak fűtött, fűtött, és kiolvadt a fűtő patron fűtőszála. Vettem teljes hotend blokkot, azzal működött, és utána hasonlítottam össze, és kiderült, hogy a fűtő betét ellenállása végtelen. Aztán amikor a hőmérséklet újra összevissza mászkált, akkor kezdtem vizsgálni, és akkor jöttem rá, hogy kicsúszik a termisztor.
 . Mivel soha nem dolgoztam még ilyesmivel, elég sokára jöttem rá, mi a gond. Vettem olyan hotend blokkot, amiben csavarral lehet rögzíteni a termisztort, azóta csak olyat használok.
. Mivel soha nem dolgoztam még ilyesmivel, elég sokára jöttem rá, mi a gond. Vettem olyan hotend blokkot, amiben csavarral lehet rögzíteni a termisztort, azóta csak olyat használok. -
Janos250
őstag
A schematic diagramon:
Fenn ott vannak a 7 szegmenses kijelzők. A LED9.
Balról megy bele a GR4, GR3, GR2, GR1. Gondolom ez címzi meg, hogy melyik szegmens világítson, mert a 4 vonal ehhez passzol.
De mit csinál alul a SEG1, SEG2? Hogyan működik? Lehet, hogy én teljesen félreértem a címzését, működését?Szerk: Hoppá, a második mondatod: Akkor a bal oldali négy vezeték nem kódolt cím, hanem a 4 kijelző közül egyet kijelöl?
-
Imy
veterán
-
gyapo11
őstag
analóg, amit nem tudsz multiplexelni
De vannak ilyen cmos ic-k, régen sok erősítőbe, előerősítőbe tettek ilyet, hogy ne a puruttya yaxley legyen a bemenetválasztó.
I2c-ről nem régen volt szó, hogy ha a libraryban nincs lekezelve, akkor akár az egész program futását meg tudja állítani egy hibás szenzor.
-
gyapo11
őstag
Működhet, de szerintem a soros kommunikációban elég sokat van L szint is, amikor a puffer nem tötltődne. Ide speciálisan olyan protokoll jó, amiben kevés az L szin és az is rövid, minél többet van H-n, annál kevésbé hullámos a pufferen a feszültség.
Vagy 12 V-os H, és a puffer után táp ic, ami lesimítja és 5 vagy 3.3 V-ra állítja be a tápfeszültséget. Ilyenkor kell szintillesztés, ha nem 12 V-os a soros bemenet. -
Janos250
őstag
Próbára azt csináltam, hogy nem zártam le a kapcsolatot, hanem küldözgettem egy próba szöveget.
Néhányszor átment, aztán néhány után újra kellett építeni a kapcsolatot.
Ez az újraépítés a lassú, nagyon. Ezért nincs ilyen gond az UDP-vel, mert ott nincs kapcsolat.
Az előbb írtam, hogy lehet telnetes irányban próbálkozok, mert ott percekig nem szakadt meg a kapcsolat, vagy WEB lap törzsében. Vagy fájlként, de azt nem tudom hogy kell, utána kellene nézni. -
Janos250
őstag
Köszi, de inkább ide írom, hátha valamikor más is érintett lesz.
Nincs http! Küldő oldalon ez van:if (client.connect(fogadoFel, 80)) {client.print("proba \n");client.stop();}
fogadón meg ez:while(client.available()){String line = client.readStringUntil('\r');
Ha a küldő oldalon nem zárom le, akkor is megszakad egy idő után.
Az elv:
A küldőre érkeznek adatok UART-on, minden egész másodpercben egy néhány kilóbájtos adag, ezt kell küldeni a fogadó fél számára, aki szintén továbbítja ezt UART-on a tetthelyre.
Neten keresgéltem, mások is panaszkodnak.
Lehet persze, hogy nálam a szinkronnal is van baj, majd próbálom a setTxBufferSize-al az UART pufferjét nagyobbra állítani. -
repvez
addikt
utána néztem mi ez a hatás, de pont az ellentétije vagyok, én tisztába vagyok vele, hogy nem értek hozzá és nem próbálok meg mást meggyőzni, hogy én jobban tudom.
A gépészetben meg pont ez a jó, hogy ha nem is tudod, hogy mi hova való vagy mire való, attól még ki tudod találni ,hogy melyik hova passzol akár egy kirakó.
De az elektronikában meg ahogy mondják, hogy az áram alatt lévő vezeték ugyan úgy néz ki mint amelyik nincs, csak más a fogása.
Ha meg tervezel valamit, ott meg vannak a fizikai mértetek amit látsz, hogy ha valami nem fér oda vagy megakad benne.az elektronikában meg építés közben nem derül ki ha valami nem oda való,mert a vezetéket bárhova kötheted és ki is maradhat , nem derül ki a hiba mig be nem kapcsolod.
-
repvez
addikt
Nem csodálkozom, mindenhol erre az eredményre jutnak a végén amikor elmondom, hogy hogy szeretném megoldani a dolgokat. mivel arra nincs időm, hogy csak ugy cél nélkül tanuljam a dolgokat, csak arra, hogy célirányosan valamit fokozatosan csak amire szükségem van.
Egyébként valami olyasmit szeretnék, mint egy quadro kopter csak más elveken mint a hagyományos kialakitás.
ahogy néztem ehhez kellene:
MPU9250es gryo
neo6m gps modul
egy brusless motor+vezérlő
6db távolságmérő
5db légnyomásmérő
egy humidity+temperature modulHa jol gondolom akkor I2C protokolon keresztül kellene összekötni , hogy minden modult rá tudjak kötni , máskülönben ütné egymást a jelek.
ÉS ahogy irtam ehhez kellene egy virtuális fejlesztő környezet ahol ezeket a modulokat be tudom állitani mielött fizikailag is belevágnék, mert ahogy látható igy is 15-20 ezer lenne az alkatrész és ahhoz elég sok, ha semmi nem lesz belőle és csak kidobtam rá a pénz.
De ha már virtuálisan látszik, hogy müködhet az amit elgondoltam akkor már van értelme tovább lépni az elméleti virtuális tesztekről a fizikai megvalósités felé. -
repvez
addikt
ugy értettem, hogy egy könyvben ki tudja, milyen szisztéma alapján követik egymást a dolgok vagy másvalaki projectje csak hasonlithat .
Mint ahogy látom is , hogy hiába néztem meg pár ilyen videot ami elvileg ugyan olyan eszközt kapcsoltak a kód mindegyiknél más volt.
igy ha össze is ollozom a neten találtakat a végeredmény nem fog müködni, mert más más elemekkel kellene összedolgoznia. arról nem is beszélve, ha nincs hozzá magyarázat akkor lehet hogy téves következtetéseket vagy rossz dolgokat tanulok meg rola.Arról nem is beszélve, hogy ahány fejlesztő környezet annyi beállítás, az arduiono .cc oldalon a webeditorba is hiába másoltam be egy kész kód sort ,hibát dobott a futtatásnál . a Skiid editornál meg nem tudok beimportálni egyedi libraryt a modulokhoz, vagy más modult betenni az alapok mellé. a tinkercadnál se találtam olyan menüt ahol ezeket meg tudnám tenni, vagy egyáltalán a pro micro alapmodult ki tudnám választani a kapcsoláshoz.
-
repvez
addikt
páran már mondták hasonlót, pedig ez egyáltalán nem így van csak másfajta megközelítéssel szemlélettel gondolkodom.Gyakorlatias és visuális tipus vagyok és ezért nem a száraz olvasott anyagot preferálom hanem tapasztalati úton a saját problémámon keresztül megoldva.
én úgy szeretnék megtanulni , hogy közben valami hasznosat és olyan dolgot csinálok ami érdekel és nem egy olyan dolgot amit valaki más gondolatmenetét tükrözi esetleg 20 évvel ezelőtti megoldás aminél mostanra már talán van egyszerűbb megoldása is.
Sokkal jobban megmarad és előbb is megtanulom, ha nem másvalaki példaprogramját írogatom , hogy megtanuljak egy funkciot programozni inkább úgy, hogy akkor tanulok meg egy funkciót amikor az én programomban szükség lenne rá.
Mert lehet hogy megtanulok könyvből 10 funkciot, de a problémámra csak 5re van szükség, de 2-t pont nem tartalmaz az a 10 amit már tudok. szóval addig míg nem tudok mindent addig jobban koncentrálnék arra ami épp kell .Csak az a másik, hogy azt se tudom mikor mi kellegyébként köszönöm a felajánlást, de nem tudom, hogy ez jo hely lenne e hogy összerondítsuk mindenféle very basic levellel
-
gyapo11
őstag
Saját példám, hogy egy szombat reggel leültem a géphez, akkor még dos meg 486 33 MHz volt a menő, és egy turbo pascal 4.0 könyvből kezdtem tanulni az utasításokat. Délután már írtam programokat, prímszámok, rendezés meg ami eszembe jutott.
Viszont ugyanezt megpróbáltam a Dennis M. Ritchie C könyvével, és nem értettem, egy óra után föladtam. Később példákat nézegetve azért egyszerűbb programokat meg tudtam írni c-ben, a filekezelés többször gyorsabb volt mint a turbo pascalé.
Tanulság: meg lehet tanulni egy könyvből is az alapokat, de nem mindenkinek megy minden.
Én is alapszinten érzem magam c++-ból, de ezeket az alapokat szívesen elmagyarázom, indítsunk egy alapszintű programozás csevelyt. Felőlem mehet az emulátor is, szerintem az a fontos, hogy programot tudjon írni, ami működik és azt csinálja ami a cél volt. -
repvez
addikt
Jól látod a dolgot, erre próbáltam utalni , hogy először virtuálisan próbálnám meg megcsinálni azt amit akarok, mert ott egyből kiderül ,ha valami nem működik.
És mikor már a megépítésre kerül a sor akkor egy viszonylag működő dolgot kapjak ami egyrészt nagyobb sikerélményt nyújtana, mint mikor pénzt és időt pazarolva minden egyes kudarccal több idő eltelik, mire újra forrasztom vagy másik eszközt szerzek be.De ez egyedül nulla előképzettség mellett elég nehéz. Próbáltam a c++ vagy más nyelveket is magamtól megtanulni, de hiába a könyvek és a videók, semelyik se úgy van kialakítva, hogy az abszolút nulláról is megértsék és fejlődjenek belőle. mindegyik már az első dolgok olyan kifejezéseket vagy dolgokat mond vagy mutat amiket nem értek. vagy csak egy kis részét mutatják meg, de azt nem, hogy ezt mire lehet később hasznosítani. Vagy ha minden egybe van akkor meg más fejlesztő környezetet használ más könyvtárakat és hiába másolom le szóról szóra nálam nem mülödik.
ugyan ez itt is megvan, a net tele van a kis részegységek kapcsolásával és programozásával egyenként, de arról, hogy az így kapott adatokat mire és hogyan tudom felhasználni illetve kombinálni a másik egység értékeivel az már nagyon ritka. Mert addig minden szép és jó amíg csak egy egységet kell rákötni a main boardra, de mi van ha többet kell egyszerre rákötni és elfogy a szabad láb vagy ugyan arra a lábra kellene több egységet is tenni?
tudom, hogy aki tud programozni vagy ért az elektronikához annak ezek a kérdések hülyeségnek hangzik, de egy laikusnál ezek az apró dolgok is nagy akadályokat jelenthetnek.
-
repvez
addikt
próbáltam a Tinát, meg az EAGLE és a Sprint layout programokat, de azok inkább PCB tervező szoftverek az alap alkatrészekkel.
itt meg az érzékelőket készen kapod és csak be kell kötni őket.
DE a legnagyobb problémám nem is a kapcsolás, mert azt ahogy írtad megtalálható a neten , hanem a programozás része, hogy a kapott adatokkal hogyan dolgozzon.
Mert ötleteim vannak , de programozás híján nem igen tudom, hogy azokat hogyan működtessem .Pont emiatt is akarnék belevágni hátha igy a gyakorlati dolgokon keresztül megtanulnék programozni is.A pro micróm is azért van, mert egy analóg joystikot akarok átalakítani USB-re, amihez minden adott a softver is, már csak össze kell raknom.
viszont van egy másik ötletem amihez még nincs meg csak a pro micro. de ez komolyabb lenne de mivel semmit nem tudok igy elég nagy az esélye, hogy feleslegesen venném meg a cuccokat. jelenleg nincs meg a felszerelésem se ahhoz, hogy fizikailag megcsináljam .DE addig is míg meglesznek a feltételek legalább el tudnék indulni valamerre a folyamattal.
Köszi a linkeket.
-
repvez
addikt
tudom, hogy filléres cuccok, csak ha valamiből több kell akkor a sok kicsi összeadódik és ha még ráadásul kiderül, hogy arra amire akarom használni nem is lesz jó, hanem egy másik fajta kellene akkor csak kidobott pénz lesz és még vehetem meg a másikat is mellé.
ás mivel még sose csináltam ezelőtt és nem is elektromos végzettségem van így gyanítom nagyon sokszor belefutnék ilyenbe vagy még akár abba is, hogy leégetem valamit .
DE virtuálisan ennek kicsi az esélye.


















 Jó oldalt nézek akkor egyáltalán?
Jó oldalt nézek akkor egyáltalán? 






 . Az adatlapon első blikkre kicsit megtévesztő. Még jó, hogy az MCP-k esetén az INT-jel polaritása is megszabható, meg az is, hogy csak open-drain kimenet legyen, vagy push-pull.
. Az adatlapon első blikkre kicsit megtévesztő. Még jó, hogy az MCP-k esetén az INT-jel polaritása is megszabható, meg az is, hogy csak open-drain kimenet legyen, vagy push-pull.


![;]](http://cdn.rios.hu/dl/s/v1.gif)


 . Mivel soha nem dolgoztam még ilyesmivel, elég sokára jöttem rá, mi a gond. Vettem olyan hotend blokkot, amiben csavarral lehet rögzíteni a termisztort, azóta csak olyat használok.
. Mivel soha nem dolgoztam még ilyesmivel, elég sokára jöttem rá, mi a gond. Vettem olyan hotend blokkot, amiben csavarral lehet rögzíteni a termisztort, azóta csak olyat használok.
Új hozzászólás Aktív témák
 ekkold
ekkold- Házimozi belépő szinten
- Milyen autót vegyek?
- World of Tanks - MMO
- Kormányok / autós szimulátorok topikja
- Ne várj sokat a vásárlással: drágulás a láthatáron
- Samsung Galaxy S25 Ultra - titán keret, acélos teljesítmény
- Steam Deck
- One otthoni szolgáltatások (TV, internet, telefon)
- Amazon Kindle
- Beépül a Nano Banana a Google Fotókba
- További aktív témák...
- Gigabyte AORUS 16X - i9 14900HX, 32gb ram, RTX 4070 (140w) 1tb SSD + gyári gari
- HTPC házi szerver config eladó ÁFÁS számla (Ryzen 5 2400G, 16 GB RAM)
- Jack Wills Parka Jacket Men kabát eladó
- HP Spectre x360 Érintős Hajtogatós Laptop Tab 16" -60% i7-13700H 16/1TB Iris Xe 3K+
- 7 DARAB! HP ELITEBOOK LAPTOP (Tartós, Elnyűhetetlen) 850 G8, 840 G8, 840 G9, 840 G10
- Hp Prodesk 600 G3/ G5/ G6 SFF/ i5 8-9-10 gen / Elitedesk 800 G4 /Win11- Számla, garancia
- LG 45GR95QE - 45" Ívelt OLED / 2K WQHD / 240Hz 0.03ms / NVIDIA G-Sync / FreeSync Premium / HDMI 2.1
- Eredeti Lenovo 135W töltők (sárga téglalap)
- Samsung Galaxy Tab A8 32GB, Újszerű, 1 Év Garanciával
- Bomba ár! Lenovo X1 Carbon 1st : i5-3GEN I 8GB I 240SSD I 14" FHD I mDP I Cam I W10 I Gari!
Állásajánlatok

Cég: PCMENTOR SZERVIZ KFT.
Város: Budapest

Cég: Laptopműhely Bt.
Város: Budapest