Hirdetés
- sziku69: Fűzzük össze a szavakat :)
- sziku69: Szólánc.
- Luck Dragon: Asszociációs játék. :)
- D1Rect: Nagy "hülyétkapokazapróktól" topik
- ubyegon2: Airfryer XL XXL forrólevegős sütő gyakorlati tanácsok, ötletek, receptek
- Luck Dragon: Alza kuponok – aktuális kedvezmények, tippek és tapasztalatok (külön igényre)
- Meggyi001: Áram nélkül....méltóság nélkül.....
- Pajac: Hawking
- Sapphi: StremHU | Source – Self-hostolható Stremio addon magyar trackerekhez
- Luck Dragon: MárkaLánc
Új hozzászólás Aktív témák
-
#2842
 #79335424
törölt tag
aprokaroka87
#2840
#79335424
törölt tag
aprokaroka87
#2840
#79335424
törölt tag
válasz
 aprokaroka87
#2840
üzenetére
aprokaroka87
#2840
üzenetére
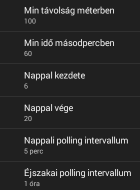
Nem használok helyfüggő beállítást, de megpróbálom vázolni. Alapértelmezésben a Robot nem profilokban, folyamatokban "gondolkodik". Csak események vannak és arra reakciók, műveletek. A belépek egy helyre, az egy pillanatnyi esemény. Az adott helyen vagyok az egy egész más dolog, mert az egy folyamat. Ennek pillanatnyi állapotát (vagyis hogy az adott pillanatban, az "adott helyen vagyok") feltételként lehet hozzáadni egy eseményhez, vagy művelethez (ha jól sejtem, Taskerül ez az IF). Ezért, ha belépek egy helyre, arra reagálva végrehajtja a társított műveletet és ennyi, elvégezte a dolgát. Ehhez először az alapbeállításokban meg kell határozni, hogy a Robot mennyire legyen pontos/erőforrásigényes. Ezt egyszerűbb képekben megmutatni, mint leírni:

Aztán hozzáadsz egy helyet:
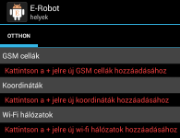
A megadott helyeket ilyen eseményekhez használhatod:

Próbáltam lekicsinyíteni, amennyire lehet, hogy ne pazaroljam a felületet. Remélem, olvasható maradt!






Új hozzászólás Aktív témák
- Tudástár Tasker - AZ Android alkalmazás
- Szép! HP EliteBook 855 G7 Fémházas Strapabíró Laptop 15,6" -65% AMD Ryzen 3 PRO 4450U 16/256 FHD
- Logitech G923 + állvány (PS5/PS4/PC) újszerű
- Bomba ár! HP Elitebook 850 G8 - i5-11GEN I 16GB I 256GB SSD I 15,6" FULLHD I Cam I W11 I Gari!
- Bomba ár! Lenovo ThinkPad L390 - i7-8GEN I 16GB I 256SSD I 13,3" FULL HD I HDMI I Cam I W11 I Gari!
- Bomba ár! Lenovo ThinkPad X260 - i5-6G I 8GB I 256SSD I 12,5" HD I HDMI I CAM I W11 I Gari!
- Dell XPS 13 9300 i7-1065G7 8GB 1000GB FHD+ 500nit! 1 év garancia
- Bontatlan Moleskine Smart Writing Set Ellipse digitális e papír füzet / 12 hó jótállás
- 188 - Lenovo LOQ (15IRX10) - Intel Core i5-13450HX, RTX 5060
- GYÖNYÖRŰ iPhone 11 Pro 64GB Silver -1 ÉV GARANCIA - Kártyafüggetlen, MS3565
- GYÖNYÖRŰ iPhone XR 64GB Black -1 ÉV GARANCIA - Kártyafüggetlen, MS4270, 100% Akkumulátor
Állásajánlatok

Cég: Laptopműhely Bt.
Város: Budapest