Ez a blog bejegyzés nem termék bemutató és nem RISC-V ismertető, ezért nem készül belőle cikk. Amolyan kiírom a gondolataimat bejegyzés és feljegyzések számomra későbbre.
Bevezető
2023-ra végre megérkeztek a megfizethető, linux-os RISC-V számítógépek (SBC).
Mi az a RISC-V?
Dióhéjban egy olyan CPU architektúra (ISA), ami nyílt és ingyenes. Részletesebb leírás: [link]. Az architektúra moduláris felépítésű, opcionális bővítéseket tartalmazhat. Részletesen itt: [link].
Miért érdekes ez számomra?
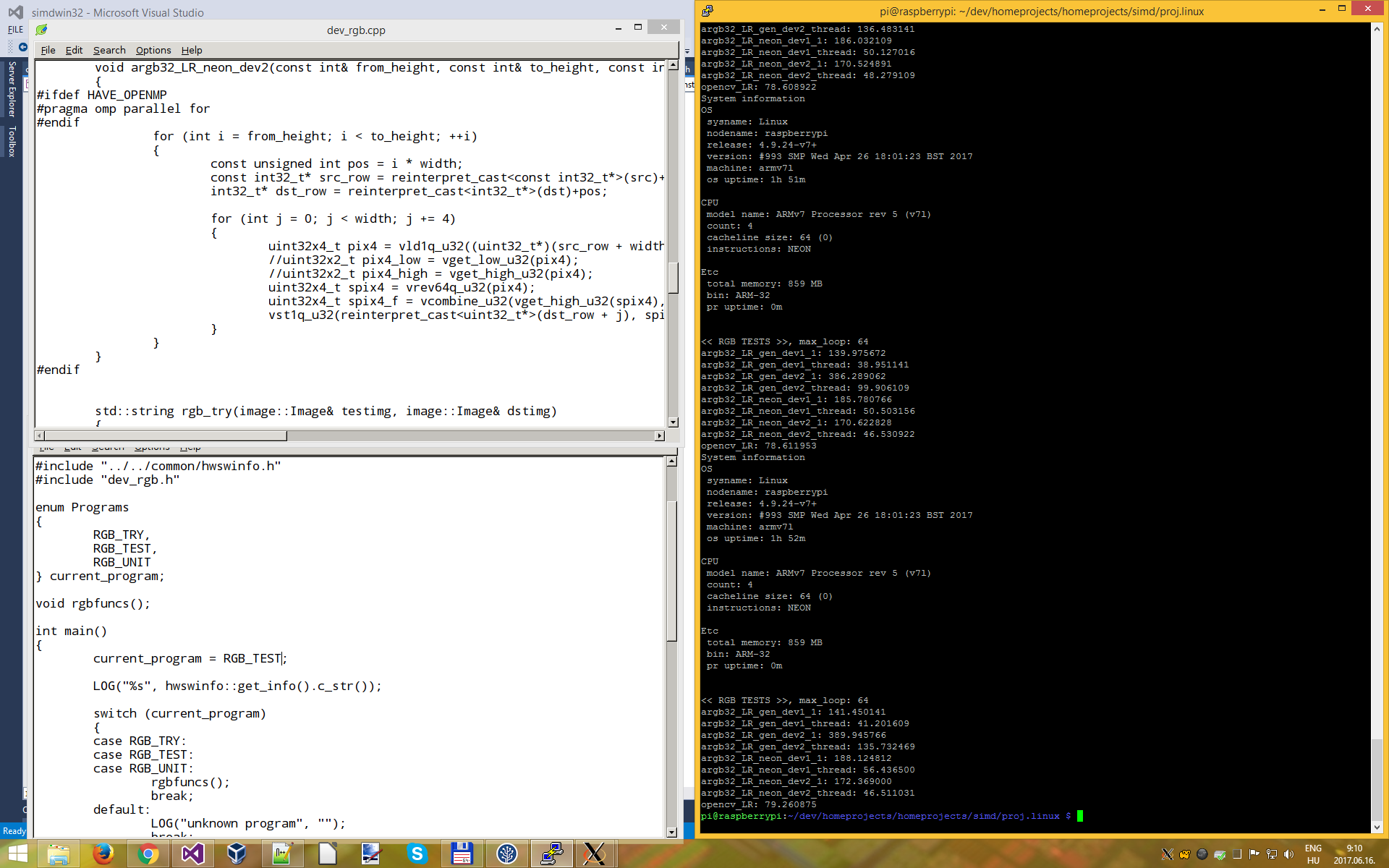
A munkám (szoftvermérnök) során mindig fontosnak tartottam, hogy hatékony kódot írjak. Szerintem ezt a szokást akkor vettem fel, amikor az első munkahelyemen korai Intel Atomokra kellett szoftvert írni, ahol ezt kikényszerítette a limitált hardware. Most se jobb a helyzet, jelenleg ARM-re kell ugyanezt tennem.
X86 és ARM mellett meg szeretném ismerni a RISC-V-t is, mert ki tudja, lehet pár év múlva erre is fejlesztenem kell. Különösen az SIMD része érdekel. X86-on használtam az SSEx-n, ARM-on pedig a NEON utasításokat.
Továbbá kíváncsi vagyok arra,
- hogy áll a Linux és egyéb nyílt forráskódú fejlesztői eszközök portolása RISC-V-re. Pl. CMake, Qt, Python, NodeJS, OpenCV, FFmpeg és Docker
- tudok-e már cross-compile-olni rá C++-os kódot
- hogy működik a RISC-V vektorműveletei (SIMD). A bővítések között szerepel “pakolt-SIMD utasítások”, ami még nyitott, így valószínűleg az ezt támogató CPU-ra még várni kell

 .
.