


Konklúzió és a többi
5. Konklúzió és további lépések
Bemutattam egy sztereó rekonstrukción alapuló robot navigációs alkalmazást, amely jól hozzáférhető elemekre épül, de számos módosítást tartalmaz. A megbízhatóság érdekében alkalmaztam a bal-jobb konzisztencia megszorítást, és a párhuzamos implementáció segítségével valós idejű feldolgozást értem el. Megmutattam, hogy a robot képes a megfelelően textúrált tárgyak határát felismerni és elnavigálni A pontból B pontba. Az elmozdulások és a 3D-s adatok nem voltak teljesen pontosak, de a biztos navigáláshoz ez is megfelelő volt.
További lépések lehetnek az erősen textúrált padlók kiszűrése, hogy minél több helyen képes legyen navigálni. Szeretném, ha fel tudná majd ismerni, hogy milyen akadályon tud még áthaladni. Tervezem még, hogy mozgás közben letárolom a 3D-s adatokat és a hozzájuk tartozó távolságokat, majd ezekből rekonstruálom és megjelenítem a bejárt pályát. Másik célom az, hogy kihasználom a robot mozgékonyságát arra, hogy egy helyben, minden lehetséges irányból felvett képből rekonstruáljam a színteret.
Tervezem még, hogy mivel már nem áll a rendelkezésemre a robot, készítek egy emulátort. Így a már lementett képek segítségével tovább tudom javítani, bővíteni a programomat.
Köszönetnyilvánítás
A dolgozatom végén szeretném megköszönni Dr. Kovács Tamás és Pásztor Attila oktatóknak, hogy a Surveyor SVS robototot a munka idejére a rendelkezésemre bocsájtották.
Továbbá köszönöm Megyesi Zoltán oktatónak, hogy az elmélet jobb megértése érdekében a segítségemre volt.
Ami kimaradt
Megjavult 3D további következményei
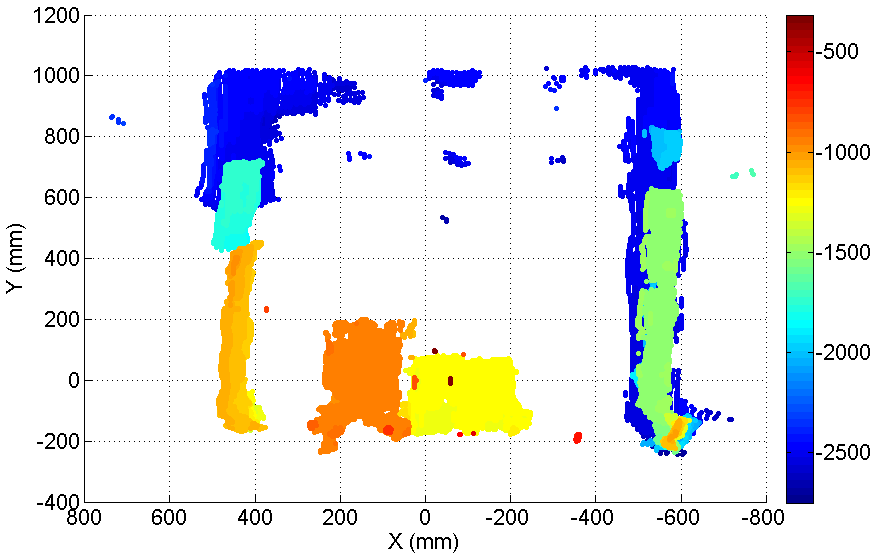
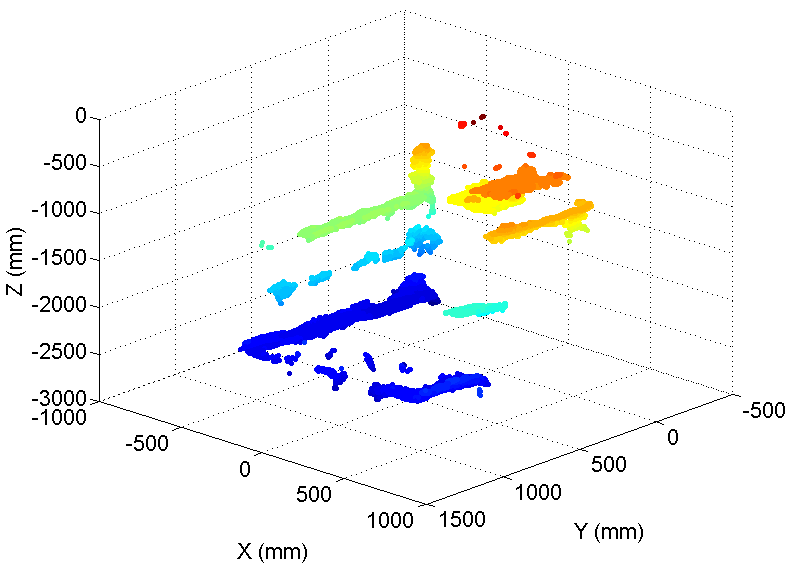
Ha még emlékeztek, az eddigi 3D-s képeknél csak a Z (távolság) értéket vettem figyelembe. Most, hogy megjavult a 3D, megnéztem a teljes X,Y,Z értékeket, hogy mit adnak:
![[/P]](http://cdn.rios.hu/dl/upc/2011-02/05/3049_oggo7q6mpcjtwhz7_real3d_682_z.png "[/P]")
A nem párosított pontok törölve, eredeti kép (bal): [link]
Bár a dobozok szélességét nem sikerült túl pontosan visszaadni, de ez "lejön" a képből, hogy mik vannak a valóságban egymás mögött/előtt.
Néhány screenshot a programból
A grafikus felületet (win32) winapiban írtam. Fut WinXP (32 bit) és Win7 (64 bit) alatt is.
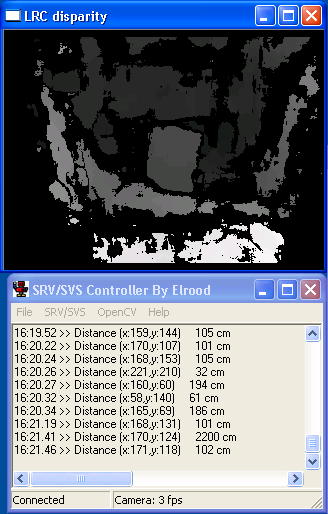
Az elmozdulás térképre kattintva megjeleníti az adott pont távolságát
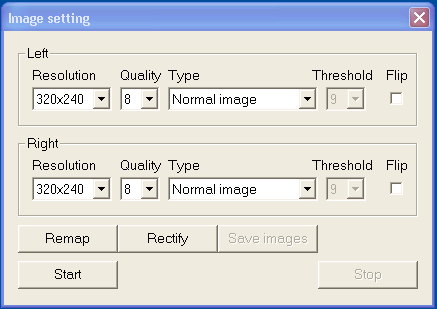
SVS képbeállítás

SRV (1 kamerás) képbeállítás

Kapcsolódás (SVS)

Navigációs ablak

Képgyűjtés

Épp navigál, túl közel van a doboz
Köszönöm a figyelmet!







